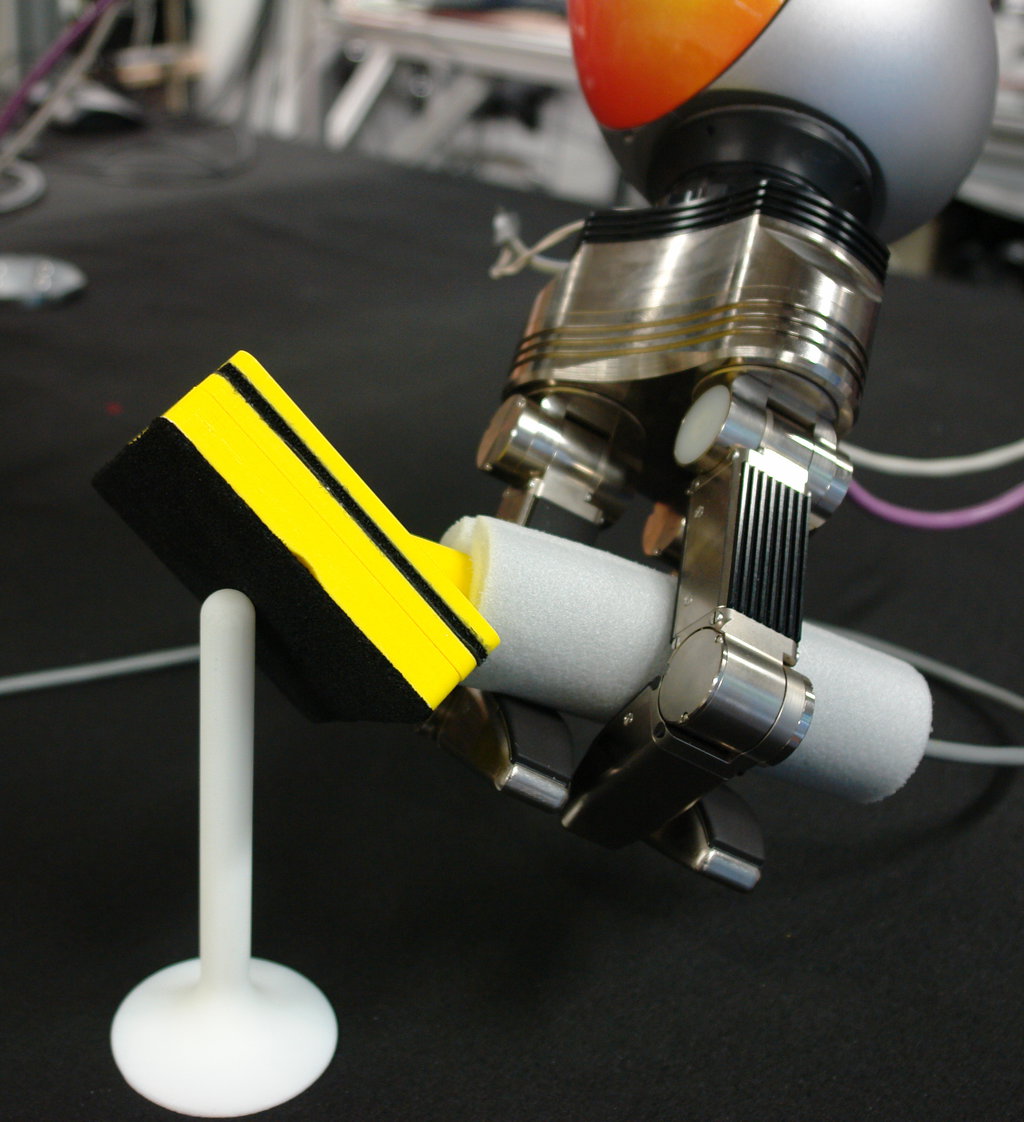
 In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
read more »






















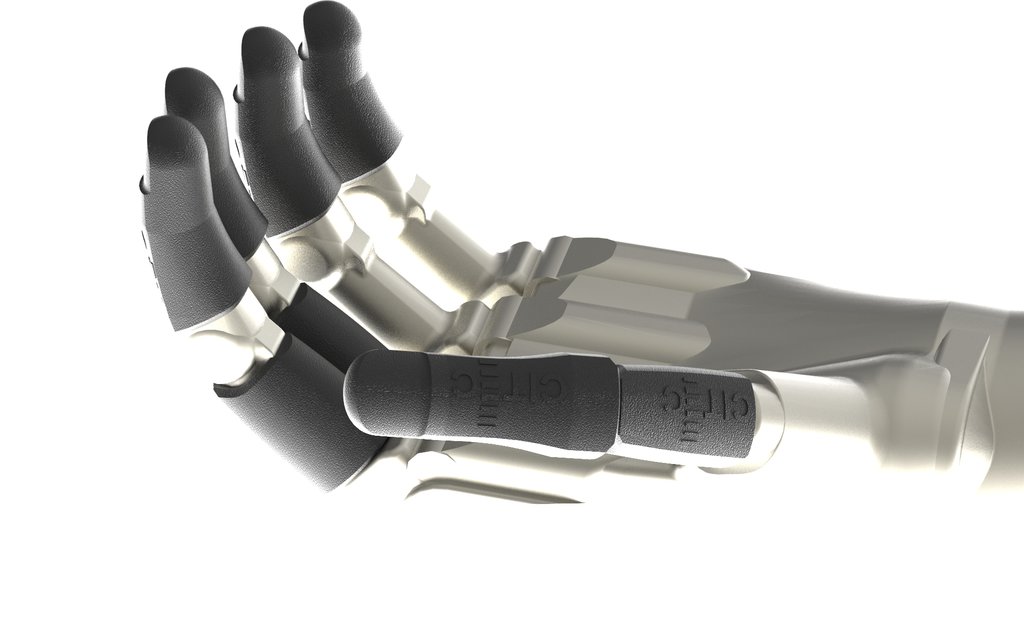 Despite decades of research, intuitive and robust control of multi-joint prosthetic hands is still an unsolved problem, largely due to missing sensorization of the hand and a poor human-machine interface, that only barely can recognize the intent of the patient. In this project we will employ and evaluate a new generation of tactile sensors coupled with modern machine learning approaches to overcome both problems.
Despite decades of research, intuitive and robust control of multi-joint prosthetic hands is still an unsolved problem, largely due to missing sensorization of the hand and a poor human-machine interface, that only barely can recognize the intent of the patient. In this project we will employ and evaluate a new generation of tactile sensors coupled with modern machine learning approaches to overcome both problems. Within the EU-Project
Within the EU-Project 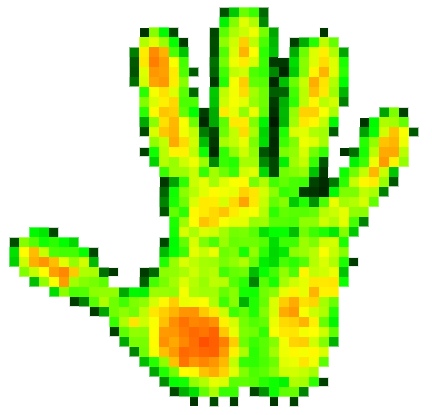 Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
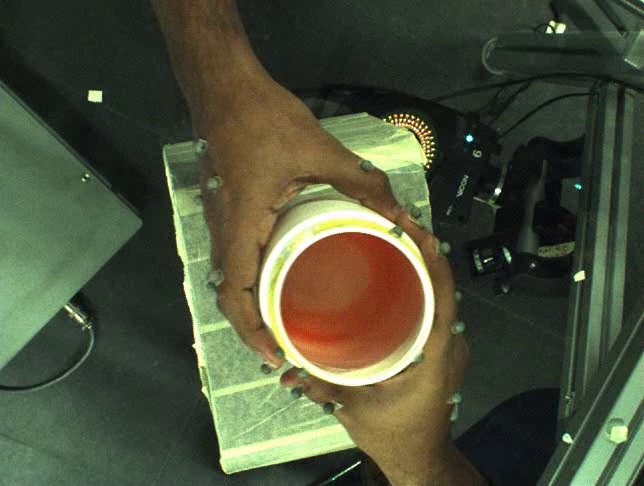 Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.
Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.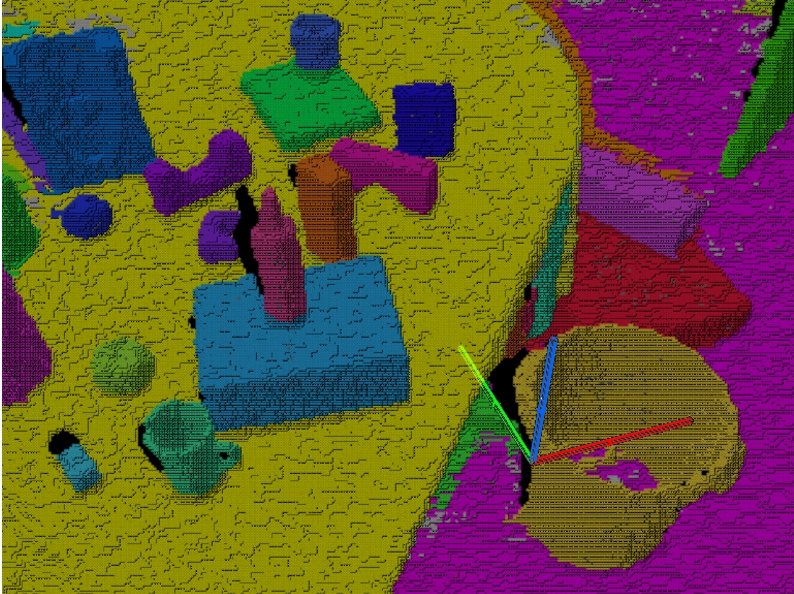 A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.
A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.