Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Welcome to the NeuroInformatics Group
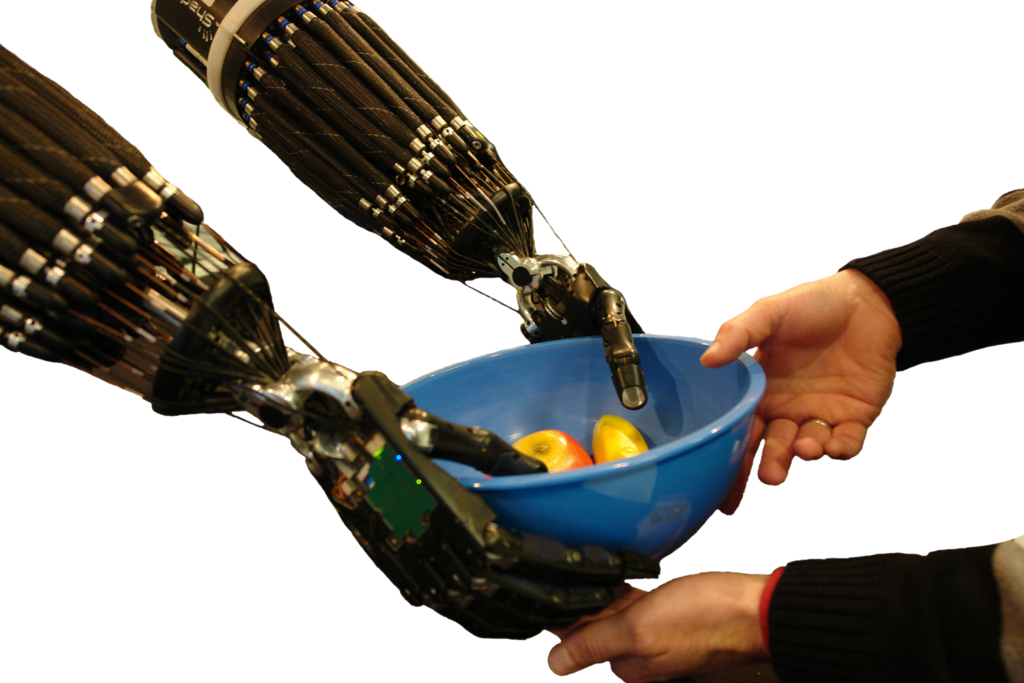
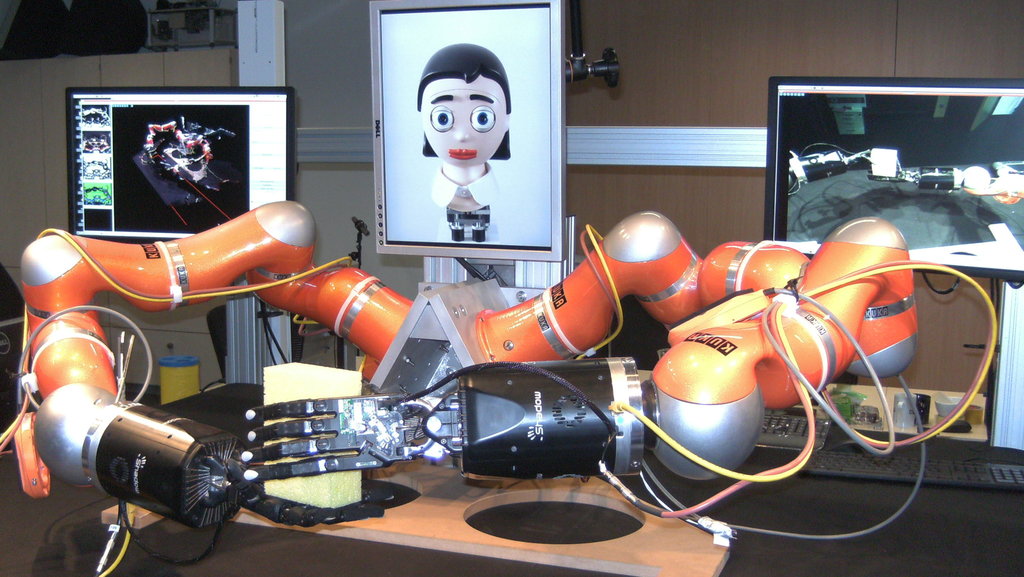



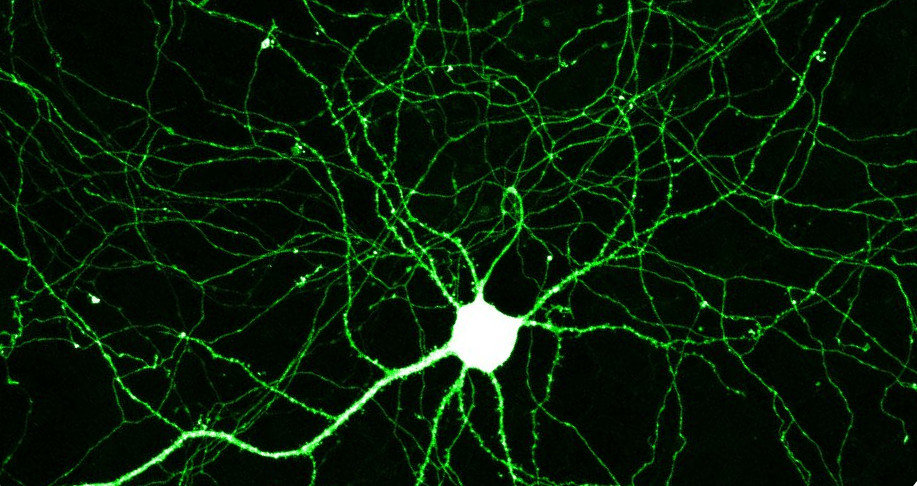
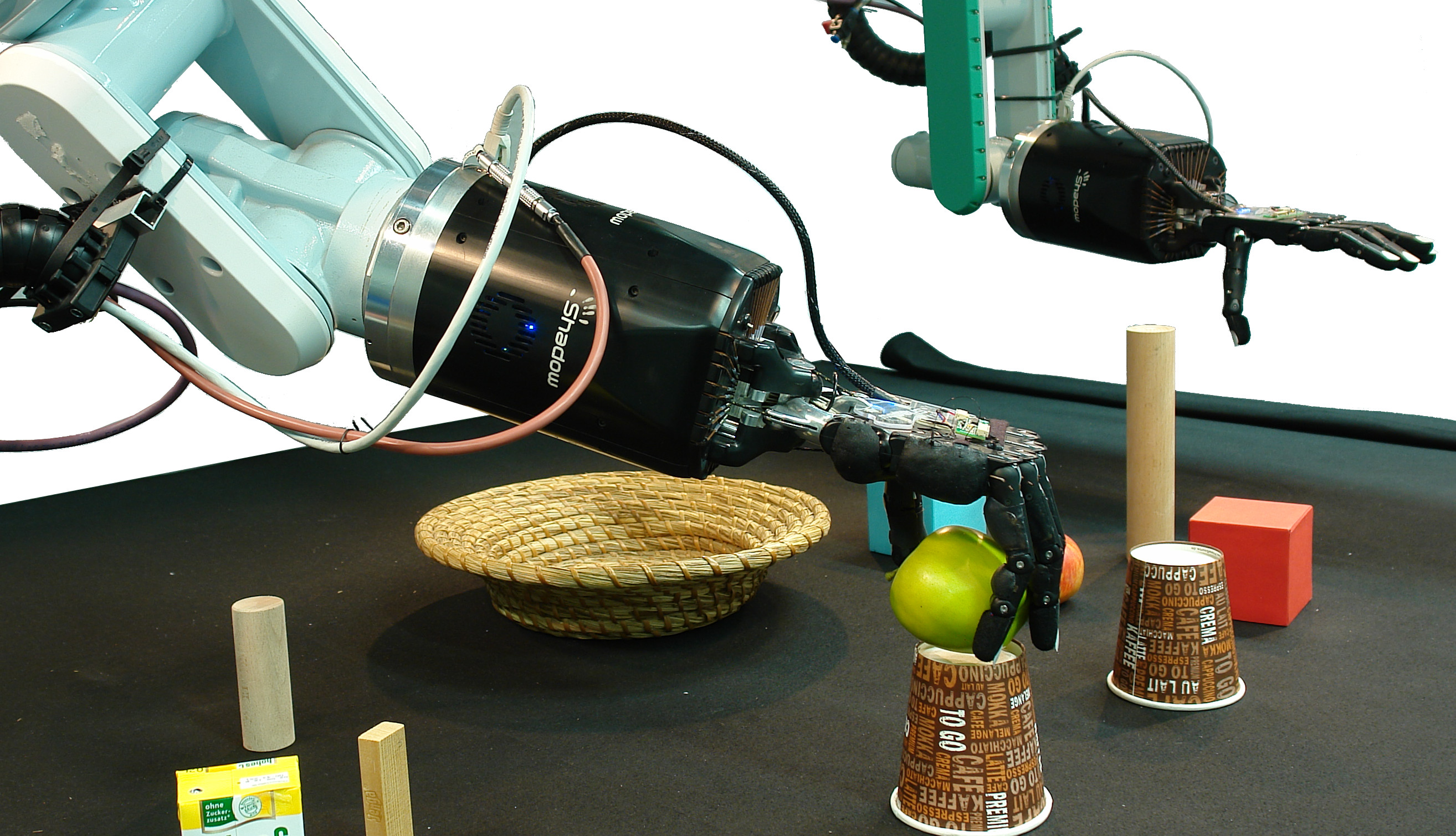
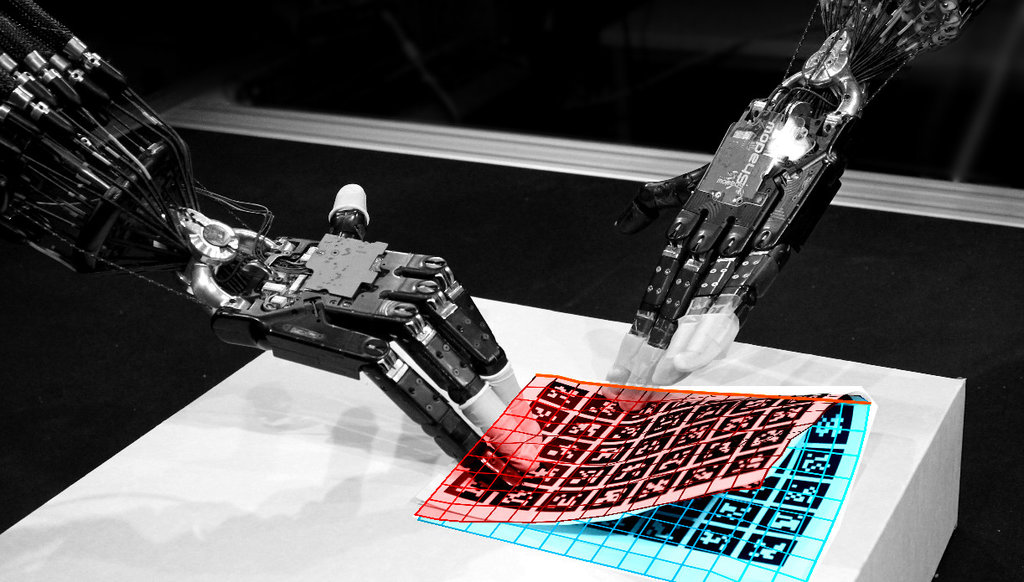

Our research is guided by the belief that neural networks have been evolved to control movements and sophisticated patterns of interaction. While today's engineered systems have to rely on an almost complete specification of their numerous details, neural systems are shaped to a large extent by self-organization, adaptation and learning. To gain insights into the working principles of these systems and to replicate similar functions in technology, we are bringing together methods from neural networks, machine learning, computer vision, dynamical systems and control, embracing topics such as data mining, brain-machine interfaces, evolutionary computation and complex systems integration, and drawing cross-disciplinary inspiration from brain science, psychology and linguistics. Due to the intimate connection between neural networks and the control of behavior we consider robotics as our major testbed. Here, our focus is on manual intelligence and its replication for articulated robot hands. Utilizing eye-, motion-, and force-tracking systems we study human manipulation actions and turn gained insights into robot control strategies to better match their capabilities to our own, utilizing tight tactile- and vision-driven feedback loops to achieve robust behaviour.