Brain-computer interfaces (BCI) provide an alternative communication channel that bypasses all muscular functions by directly decoding brain activity. When using electroencephalography (EEG) to acquire brain signals, they are non-invasive, affordable and safe. Having originally been designed as a communication tool for patients with severe physical disabilities, e.g. paraplegia or locked-in state, the application areas have grown in recent years. Our research follows a two fold approach. Firstly, we aim at improving the reliability and the communication speed of the systems. Furthermore, we investigate the usage of BCI as a research tool, in particular to study human-machine and human-robot interaction in more real-world like settings. To this end, BCI allows to investigate cognitive processes during the interaction, in almost real time and without having to rely solely on group-level data.
read more »






















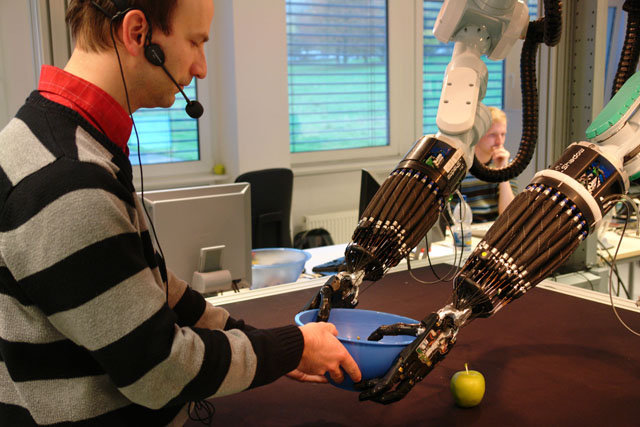 Cognitive Robotics draws from classical robotics, artificial intelligence, cognitive science and neurobiology to elucidate and synthesize aspects of action-oriented intelligence. Using a robot system with a multi-fingered manipulator and an active binocular camera head we investigate strategies how to coordinate the actions of such system with those of a human partner. We focus on dextrous manipulation of objects, combining tactile and visual sensing, the joining of action primitives into action sequences and the development of learning algorithms.
Cognitive Robotics draws from classical robotics, artificial intelligence, cognitive science and neurobiology to elucidate and synthesize aspects of action-oriented intelligence. Using a robot system with a multi-fingered manipulator and an active binocular camera head we investigate strategies how to coordinate the actions of such system with those of a human partner. We focus on dextrous manipulation of objects, combining tactile and visual sensing, the joining of action primitives into action sequences and the development of learning algorithms.
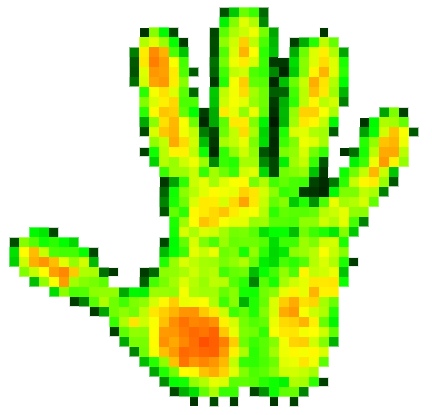 Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
 Artificial neural networks try to capture aspects of information processing of biological neural nets in artificial systems. One aim lies in an exploration and testing of hypotheses about the working principles of real neural nets, using simulation models at varying levels of abstraction. A second goal is to exploit attractive properties of neural information processing, such as error tolerance, parallel distributed processing as well as learning ability for technical applications. Besides work in the areas of robotics, computer vision, human machine interfaces and datamining we pursue basic research to topics including stability of recurrent networks, properties of competitive layer networks, neural learning and self-organizing maps.
Artificial neural networks try to capture aspects of information processing of biological neural nets in artificial systems. One aim lies in an exploration and testing of hypotheses about the working principles of real neural nets, using simulation models at varying levels of abstraction. A second goal is to exploit attractive properties of neural information processing, such as error tolerance, parallel distributed processing as well as learning ability for technical applications. Besides work in the areas of robotics, computer vision, human machine interfaces and datamining we pursue basic research to topics including stability of recurrent networks, properties of competitive layer networks, neural learning and self-organizing maps.