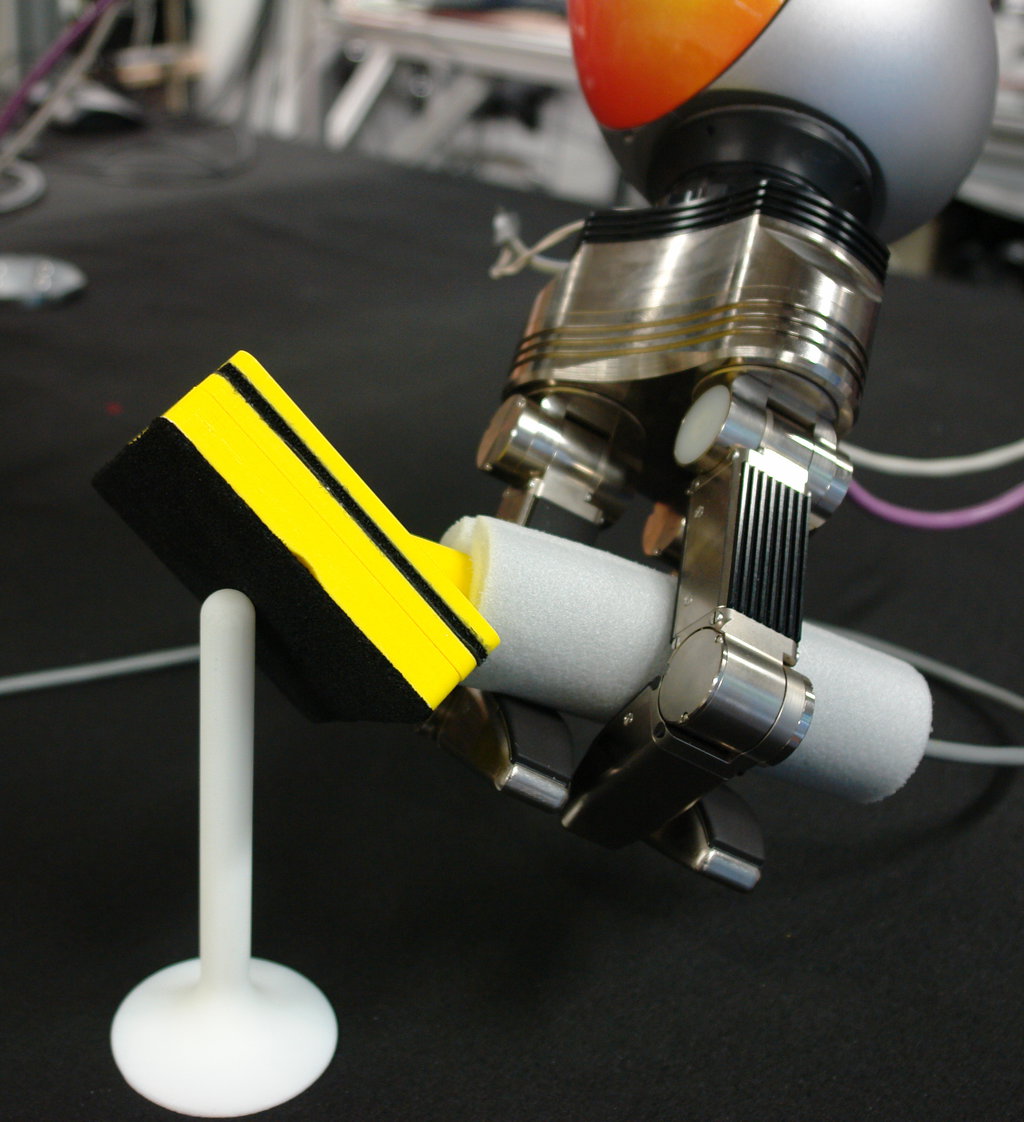
 In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
read more »






















 MONARCA will develop and validate solutions for multi-parametric, long term monitoring of behavioural and physiological information relevant to bipolar disorder.
MONARCA will develop and validate solutions for multi-parametric, long term monitoring of behavioural and physiological information relevant to bipolar disorder.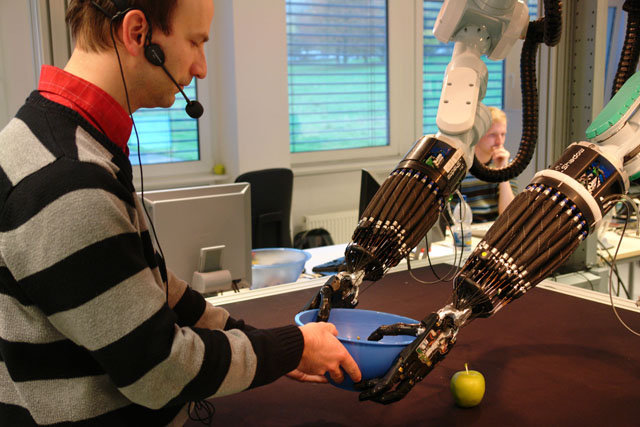 Cognitive Robotics draws from classical robotics, artificial intelligence, cognitive science and neurobiology to elucidate and synthesize aspects of action-oriented intelligence. Using a robot system with a multi-fingered manipulator and an active binocular camera head we investigate strategies how to coordinate the actions of such system with those of a human partner. We focus on dextrous manipulation of objects, combining tactile and visual sensing, the joining of action primitives into action sequences and the development of learning algorithms.
Cognitive Robotics draws from classical robotics, artificial intelligence, cognitive science and neurobiology to elucidate and synthesize aspects of action-oriented intelligence. Using a robot system with a multi-fingered manipulator and an active binocular camera head we investigate strategies how to coordinate the actions of such system with those of a human partner. We focus on dextrous manipulation of objects, combining tactile and visual sensing, the joining of action primitives into action sequences and the development of learning algorithms.