Touch is one of the primary senses humans use when performing coordinated interaction, but the lack of a sense of touch in the majority of contemporary interactive technical systems, such as robots, which operate in non-deterministic environments, results in interactions that can at best be described as clumsy.
Observing human haptics and extracting the salient information from the gathered data is not only relevant if we are to try to understand the involved underlying cognitive processes, but should also provide us with significant clues to design future intelligent interactive systems. Such systems could one day help to take the burden of tedious tasks off our hands in a similar fashion to how industrial robots revolutionized manufacturing.
We at Neuroinformatics Group aim to provide significant advancements in tactile sensing technology, and thus move us a step closer to realizing this goal.
Related Research Projects
 Ego tango, ergo sum -> I feel, thus I am. This tenor brought the development of tactile sensitive devices within CITEC Bielefeld University to the next stage -> in terms of making the technology of skin-like touch sensors available to a wider public. With project funding by the EU and the state NRW - ERDF (EFRE), our team investigate in three development areas 1. Hardware, 2. Software and 3. Business, elaborating the basis for a stable university spin-off.
Ego tango, ergo sum -> I feel, thus I am. This tenor brought the development of tactile sensitive devices within CITEC Bielefeld University to the next stage -> in terms of making the technology of skin-like touch sensors available to a wider public. With project funding by the EU and the state NRW - ERDF (EFRE), our team investigate in three development areas 1. Hardware, 2. Software and 3. Business, elaborating the basis for a stable university spin-off.
read more »
 Ziel des vom BMBF geförderten Verbundvorhabens Sim4Dexterity ist die Erzeugung synthetischer Daten für die Robotermanipulation mit hochwertigen, interaktiven und validierbaren Simulationswerkzeugen, so dass benötigte KI-Lösungen wirtschaftlich und zeiteffizient realisiert werden können.
Ziel des vom BMBF geförderten Verbundvorhabens Sim4Dexterity ist die Erzeugung synthetischer Daten für die Robotermanipulation mit hochwertigen, interaktiven und validierbaren Simulationswerkzeugen, so dass benötigte KI-Lösungen wirtschaftlich und zeiteffizient realisiert werden können.
read more »
 With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning.
With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning.
read more »
 The NeuTouch ITN aims at improving artificial tactile systems, by training a new generation of researchers that study how human and animal’s tactile systems work, develop a new type of technology that is based on the same principles, and use this technology for building robots that can help humans in daily tasks and artific
The NeuTouch ITN aims at improving artificial tactile systems, by training a new generation of researchers that study how human and animal’s tactile systems work, develop a new type of technology that is based on the same principles, and use this technology for building robots that can help humans in daily tasks and artific
read more »
 We develop a 3D VR serious game to integrate valid haptic performance testing in highly adaptable and motivating virtual game scenarios. One goal is to offer stroke patients who need to improve or relearn their proprioceptive and tactile abilities an appealing and motivating tool. It allows them to monitor their progress in a more detailed manner than traditional methods, to select a suitable level of task difficulty, and potentially to improve their self-efficacy. For that purpose we combined multiple devices to a hardware framework creating a touchable virtual world. A set of scenarios is designed where players encounter different haptic discrimination or manipulation challenges in order to evaluate detailed hand and finger movements.
We develop a 3D VR serious game to integrate valid haptic performance testing in highly adaptable and motivating virtual game scenarios. One goal is to offer stroke patients who need to improve or relearn their proprioceptive and tactile abilities an appealing and motivating tool. It allows them to monitor their progress in a more detailed manner than traditional methods, to select a suitable level of task difficulty, and potentially to improve their self-efficacy. For that purpose we combined multiple devices to a hardware framework creating a touchable virtual world. A set of scenarios is designed where players encounter different haptic discrimination or manipulation challenges in order to evaluate detailed hand and finger movements.
read more »
 Twister is a novel haptic interface, consisting of a table with an integrated rotational joint on which a test object can be mounted. Twister measures the angular velocity and the orientation of the mounted object, it also detects when the contact with the object has been established or lost. Twister can provide vibro-tactile feedback. The objects can be rotated either by the study participant or controlled by the integrated motor. Our current research targets the influence of different factors on the performance during haptic rotation. We also pursue application of Twister for hand rehabilitation of stroke patients.
Twister is a novel haptic interface, consisting of a table with an integrated rotational joint on which a test object can be mounted. Twister measures the angular velocity and the orientation of the mounted object, it also detects when the contact with the object has been established or lost. Twister can provide vibro-tactile feedback. The objects can be rotated either by the study participant or controlled by the integrated motor. Our current research targets the influence of different factors on the performance during haptic rotation. We also pursue application of Twister for hand rehabilitation of stroke patients.
read more »
 The human fingernail turns out to be very important when it comes to picking coins, scratching off stickers, or simply probing surfaces. To endow robots with similar capabilities, in this project, we are developing a sensorized fingernail for mechanical hands, i.e. robotic or prostetic hands, capable of measuring vibratory and static contact forces. High sensitivity combined with robustness for daily use are the key features describing our proposed design.
The human fingernail turns out to be very important when it comes to picking coins, scratching off stickers, or simply probing surfaces. To endow robots with similar capabilities, in this project, we are developing a sensorized fingernail for mechanical hands, i.e. robotic or prostetic hands, capable of measuring vibratory and static contact forces. High sensitivity combined with robustness for daily use are the key features describing our proposed design.
read more »
 In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
read more »
 The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors.
The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors.
read more »
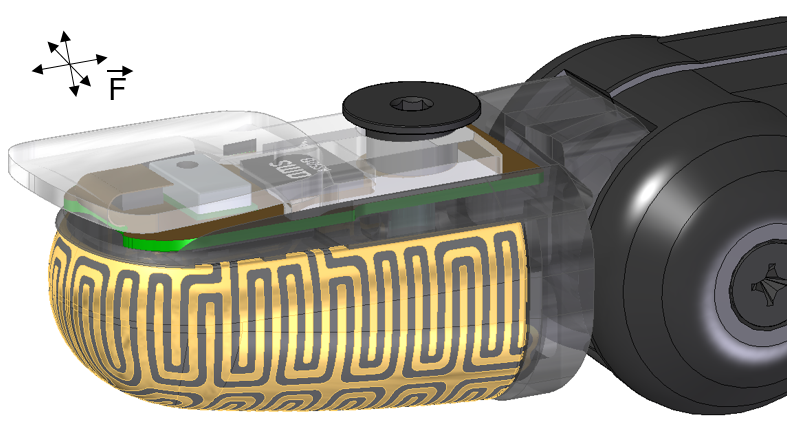
 This 12-taxel fingertip sensor provides highly sensitive normal-force sensing for our Shadow Robot Hands - fully integrated with the mechanical and electrical design of the hand.
This 12-taxel fingertip sensor provides highly sensitive normal-force sensing for our Shadow Robot Hands - fully integrated with the mechanical and electrical design of the hand.
read more »
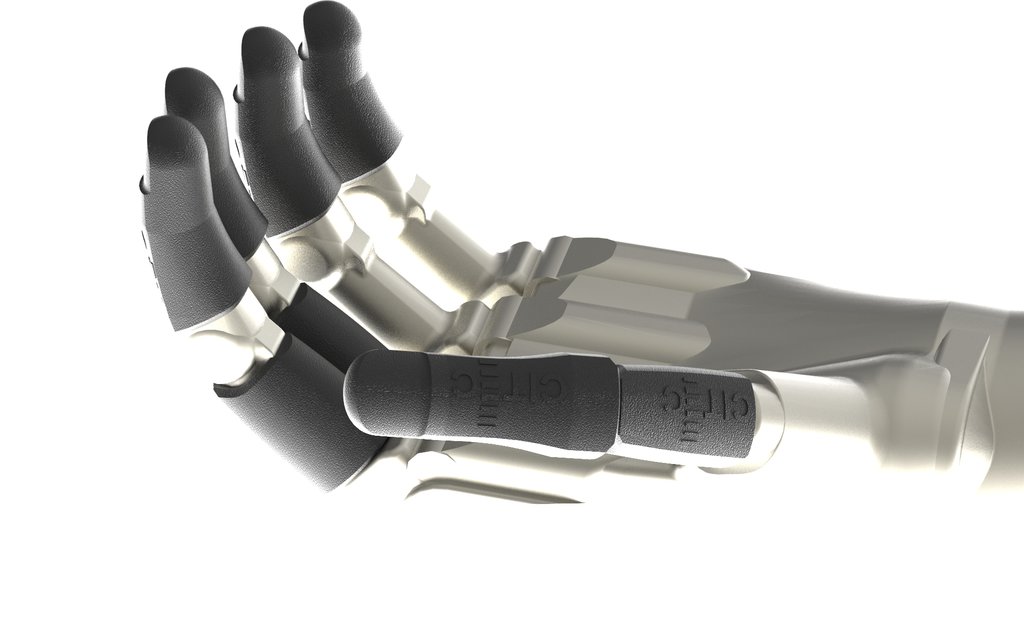 Despite decades of research, intuitive and robust control of multi-joint prosthetic hands is still an unsolved problem, largely due to missing sensorization of the hand and a poor human-machine interface, that only barely can recognize the intent of the patient. In this project we will employ and evaluate a new generation of tactile sensors coupled with modern machine learning approaches to overcome both problems.
Despite decades of research, intuitive and robust control of multi-joint prosthetic hands is still an unsolved problem, largely due to missing sensorization of the hand and a poor human-machine interface, that only barely can recognize the intent of the patient. In this project we will employ and evaluate a new generation of tactile sensors coupled with modern machine learning approaches to overcome both problems.
read more »
 Within the EU-Project WearHap, we develop different wearable devices, most notably a tactile-sensing glove, based on our elastic, fabric-based tactile-sensor-technology. The Tactile Glove provides normal force/pressure measurement in approx 60 taxels spread across the whole palmar side of the hand and allows to record human interaction forces while grasping or manipulating objects.
Within the EU-Project WearHap, we develop different wearable devices, most notably a tactile-sensing glove, based on our elastic, fabric-based tactile-sensor-technology. The Tactile Glove provides normal force/pressure measurement in approx 60 taxels spread across the whole palmar side of the hand and allows to record human interaction forces while grasping or manipulating objects.
read more »
 The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task.
The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task.
read more »
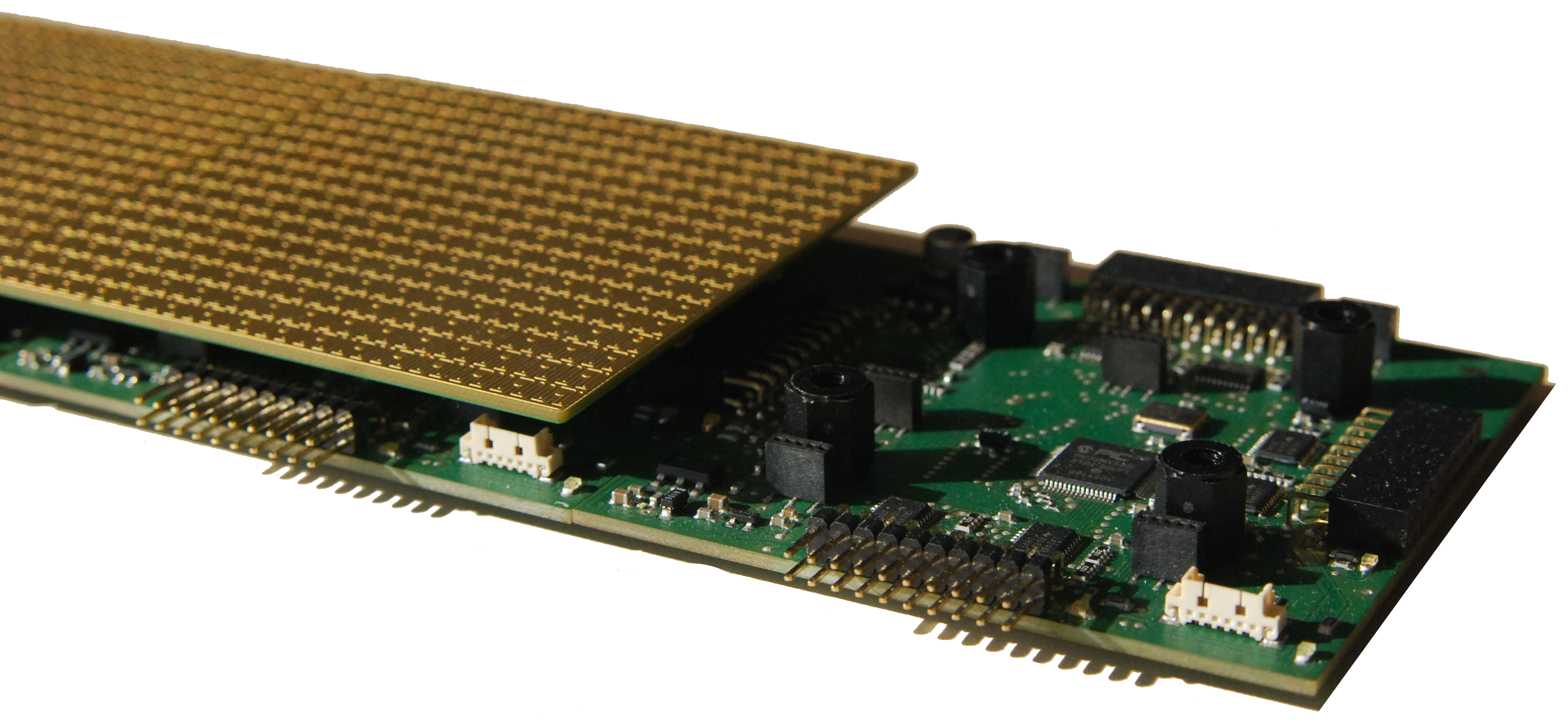 This 16x16 tactile sensor array is our workhorse for tactile-based robotics research. Providing 256 taxels on a grid of size 8cm x 8cm, we have a spatial resolution of 5mm. The modular design allows to stitch individual modules together to yield a larger tactile-sensitive surface.
This 16x16 tactile sensor array is our workhorse for tactile-based robotics research. Providing 256 taxels on a grid of size 8cm x 8cm, we have a spatial resolution of 5mm. The modular design allows to stitch individual modules together to yield a larger tactile-sensitive surface.
read more »
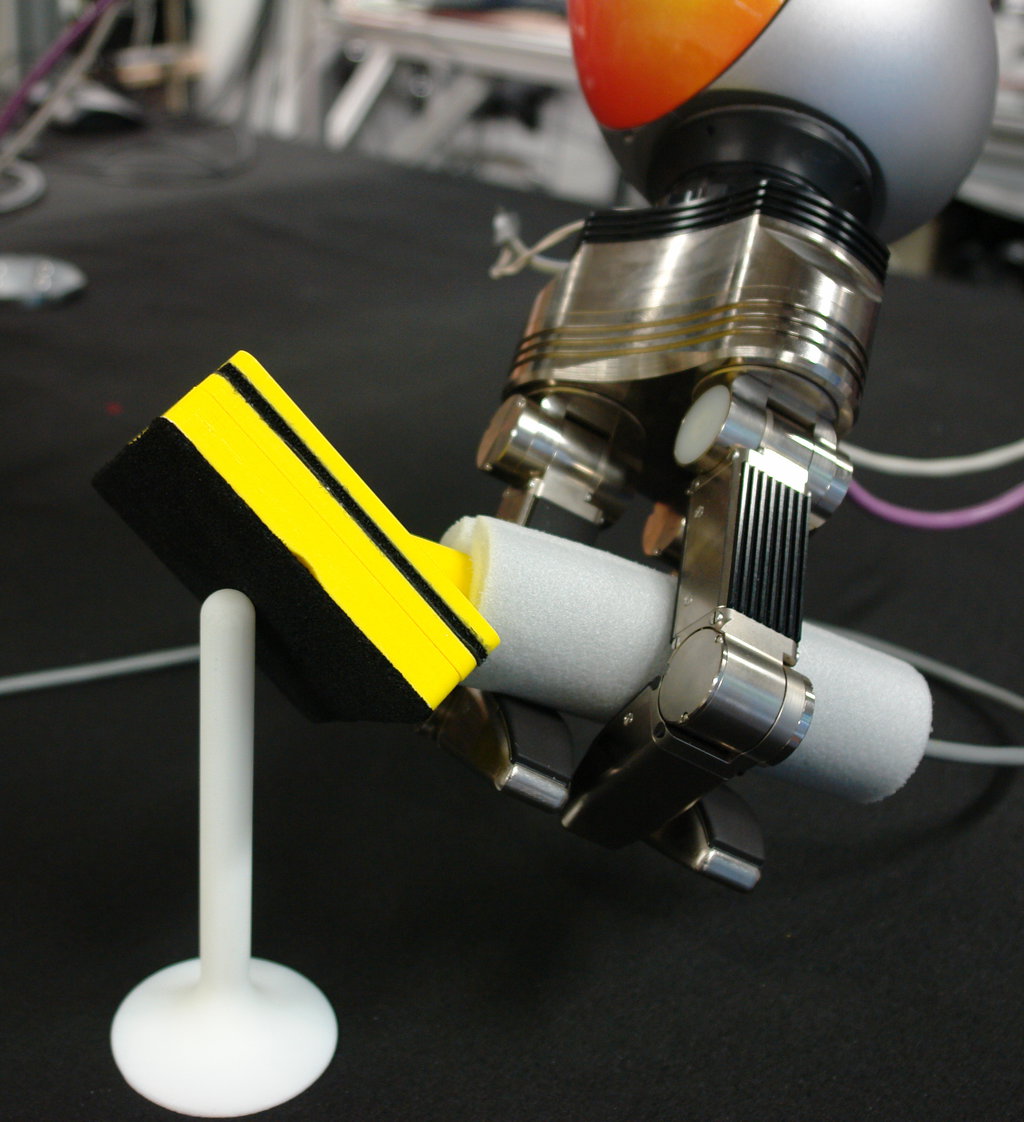
 The tactile-sensitive poking stick has mounted our Shadow Hand's tactile finger tip on a rigid stick and allows for evaluation of the finger tip itself, but also of tactile-based control algorithms - without involving the complexity of the Shadow Hands themselves.
The tactile-sensitive poking stick has mounted our Shadow Hand's tactile finger tip on a rigid stick and allows for evaluation of the finger tip itself, but also of tactile-based control algorithms - without involving the complexity of the Shadow Hands themselves.
read more »





















