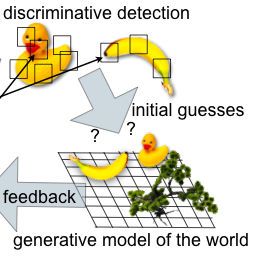
 The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
read more »






















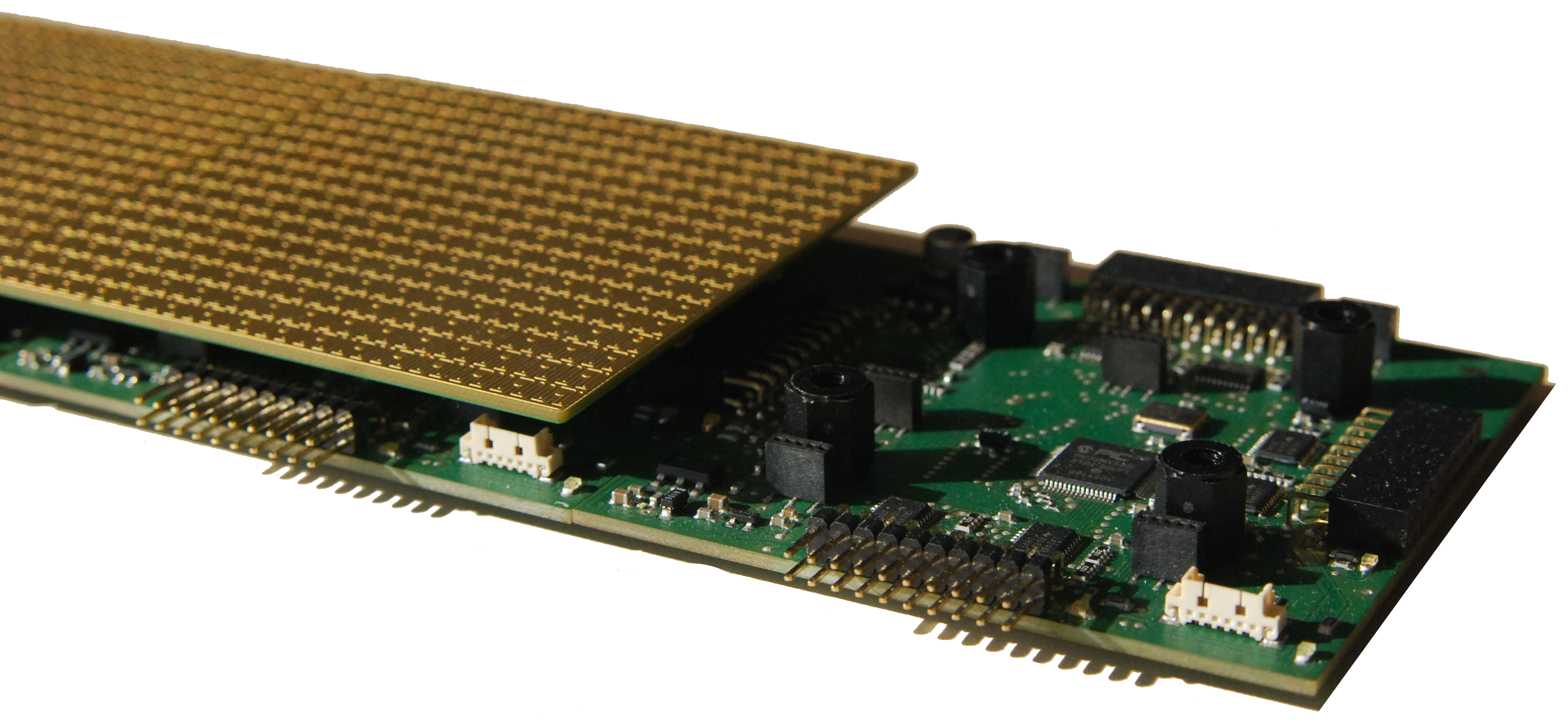 This 16x16 tactile sensor array is our workhorse for tactile-based robotics research. Providing 256 taxels on a grid of size 8cm x 8cm, we have a spatial resolution of 5mm. The modular design allows to stitch individual modules together to yield a larger tactile-sensitive surface.
This 16x16 tactile sensor array is our workhorse for tactile-based robotics research. Providing 256 taxels on a grid of size 8cm x 8cm, we have a spatial resolution of 5mm. The modular design allows to stitch individual modules together to yield a larger tactile-sensitive surface. Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.
Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.  Common webcams yield a huge amount of images, but most of them are quite boring for lack of individual fascinating entities. In this project we analyse approaches of common image and video retrieval to develop a system for filtering interesting images shot by a webcam.
Common webcams yield a huge amount of images, but most of them are quite boring for lack of individual fascinating entities. In this project we analyse approaches of common image and video retrieval to develop a system for filtering interesting images shot by a webcam.  In order to handle the ever growing amount of digital images, in this project we develop a content-based image retrieval system offering the possibility to efficiently search large image databases by automatically finding similar images. To this end, we use automatically extracted image features, derived from a selection of image candidates.
In order to handle the ever growing amount of digital images, in this project we develop a content-based image retrieval system offering the possibility to efficiently search large image databases by automatically finding similar images. To this end, we use automatically extracted image features, derived from a selection of image candidates.