Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Bimanual Interaction with Clothes
 Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.
Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.
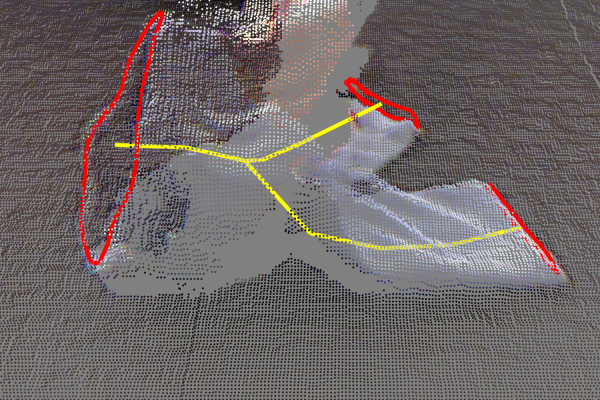 In the first phase of the project, we endowed the robot with some basic vision and grasping skills centered around the idea that boundary components are the most important topological structures of clothes. In the second project phase, we extended this idea to the dynamic case and showed how prior knowledge can be used to initialize a dynamic model. The ongoing third project phase involves the definition, implementation, and task-dependent selection of action primitives in the domain of dressing assistance, the latter requiring mechanisms to learn from interaction with the environment such as reinforcement learning.
In the first phase of the project, we endowed the robot with some basic vision and grasping skills centered around the idea that boundary components are the most important topological structures of clothes. In the second project phase, we extended this idea to the dynamic case and showed how prior knowledge can be used to initialize a dynamic model. The ongoing third project phase involves the definition, implementation, and task-dependent selection of action primitives in the domain of dressing assistance, the latter requiring mechanisms to learn from interaction with the environment such as reinforcement learning.
