Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Haptic Interface Twister
 Twister is a novel haptic interface, consisting of a table with an integrated rotational joint on which a test object can be mounted. Twister measures the angular velocity and the orientation of the mounted object, it also detects when the contact with the object has been established or lost. Twister can provide vibro-tactile feedback. The objects can be rotated either by the study participant or controlled by the integrated motor. Our current research targets the influence of different factors on the performance during haptic rotation. We also pursue application of Twister for hand rehabilitation of stroke patients.
Twister is a novel haptic interface, consisting of a table with an integrated rotational joint on which a test object can be mounted. Twister measures the angular velocity and the orientation of the mounted object, it also detects when the contact with the object has been established or lost. Twister can provide vibro-tactile feedback. The objects can be rotated either by the study participant or controlled by the integrated motor. Our current research targets the influence of different factors on the performance during haptic rotation. We also pursue application of Twister for hand rehabilitation of stroke patients.
Humans have a bias towards rotating too far when relying on their haptic sense only
A first pilot study involving the Twister evaluated human performance during haptic rotation, meaning a rotation that is relied only on the haptic sense. Five right-handed and sighted participants (2 male, 3 female) who joint the study were blindfolded.
Study design
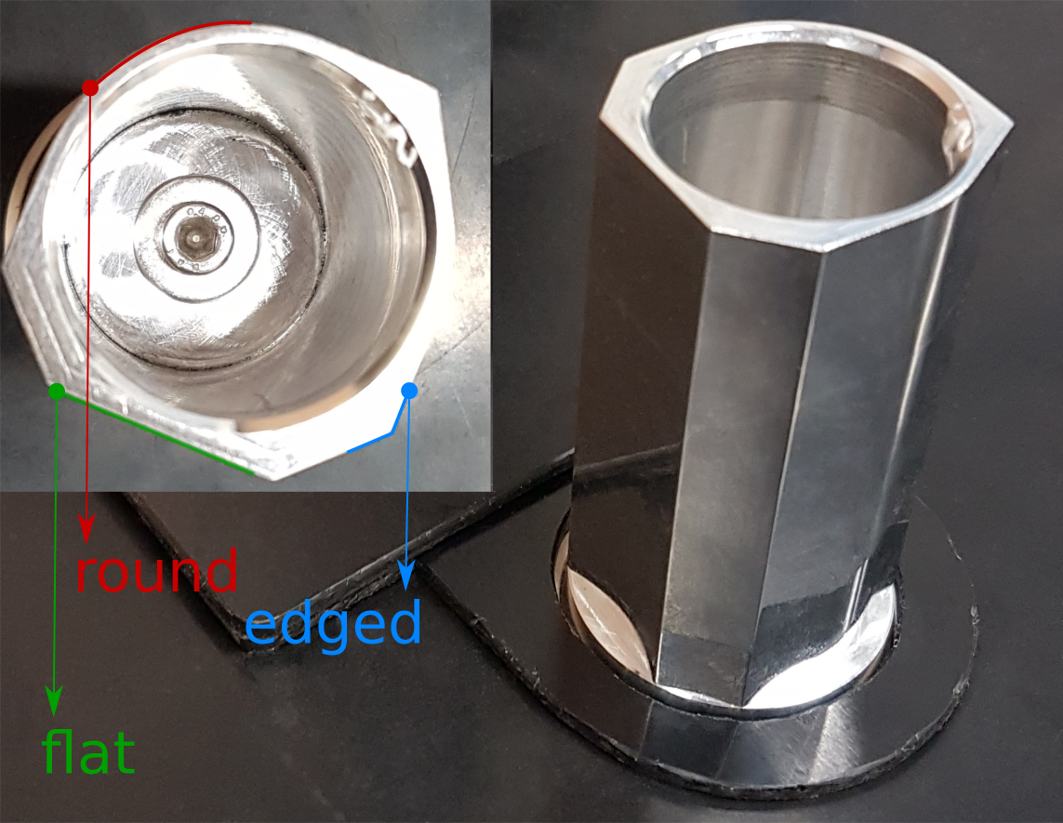 Our goal was to evaluate whether shape features have an influence on the performance. Therefore, we mounted an irregular shaped rotary knob on the Twister’s rotational joint. It consisted of round, edged and flat shapes. We assumed that when repeating the rotation very often, humans grasp nearly in the same way. Consequently, different orientations of the irregular shaped rotary knob should lead to various grasped shape features. We decided to test 36 different start orientations (every 10°). Each was repeated six times resulting in 216 trials for each participant in one session. Since this was a pilot study and we also wanted to evaluate our experimental design, participants came two days consecutively and conducted the same study.
Our goal was to evaluate whether shape features have an influence on the performance. Therefore, we mounted an irregular shaped rotary knob on the Twister’s rotational joint. It consisted of round, edged and flat shapes. We assumed that when repeating the rotation very often, humans grasp nearly in the same way. Consequently, different orientations of the irregular shaped rotary knob should lead to various grasped shape features. We decided to test 36 different start orientations (every 10°). Each was repeated six times resulting in 216 trials for each participant in one session. Since this was a pilot study and we also wanted to evaluate our experimental design, participants came two days consecutively and conducted the same study.
Task and procedure
The main task was to rotate the rotary knob around 90° counterclockwise with the right hand. We chose 90° because this is a familiar angle and the rotation direction because some pretests indicated that humans were worse when rotating with their right hand 90° clockwise. The procedure during each trial was the following: Participants were told to grasp the rotary knob. During this stage the rotary knob was blocked so that it could not be moved by accident. Once they established contact with the rotary knob, they were not allowed to correct the grip, because otherwise they would influence consciously which shapes they grasp.
Data recording and analysis
During each trial Twister measures the absolute angle of the rotary knob. From this data, we extracted the actual relative rotation angle for each trial. We computed the algebraic difference between the actual rotation angle and the target angle of 90°. Based on that we calculated two performance measures:
- Signed error as the mean of all algebraic differences for one participant for one rotary knob starting position. Small values show a higher accuracy. Positive values indicate a rotation around more than 90°, while negative values represent a rotation around less than 90°.
- Variable error as the standard deviation of all algebraic differences for one participant for one rotary knob starting orientation. This measure has only positive values. Small values show a higher precision.
Results and conclusions
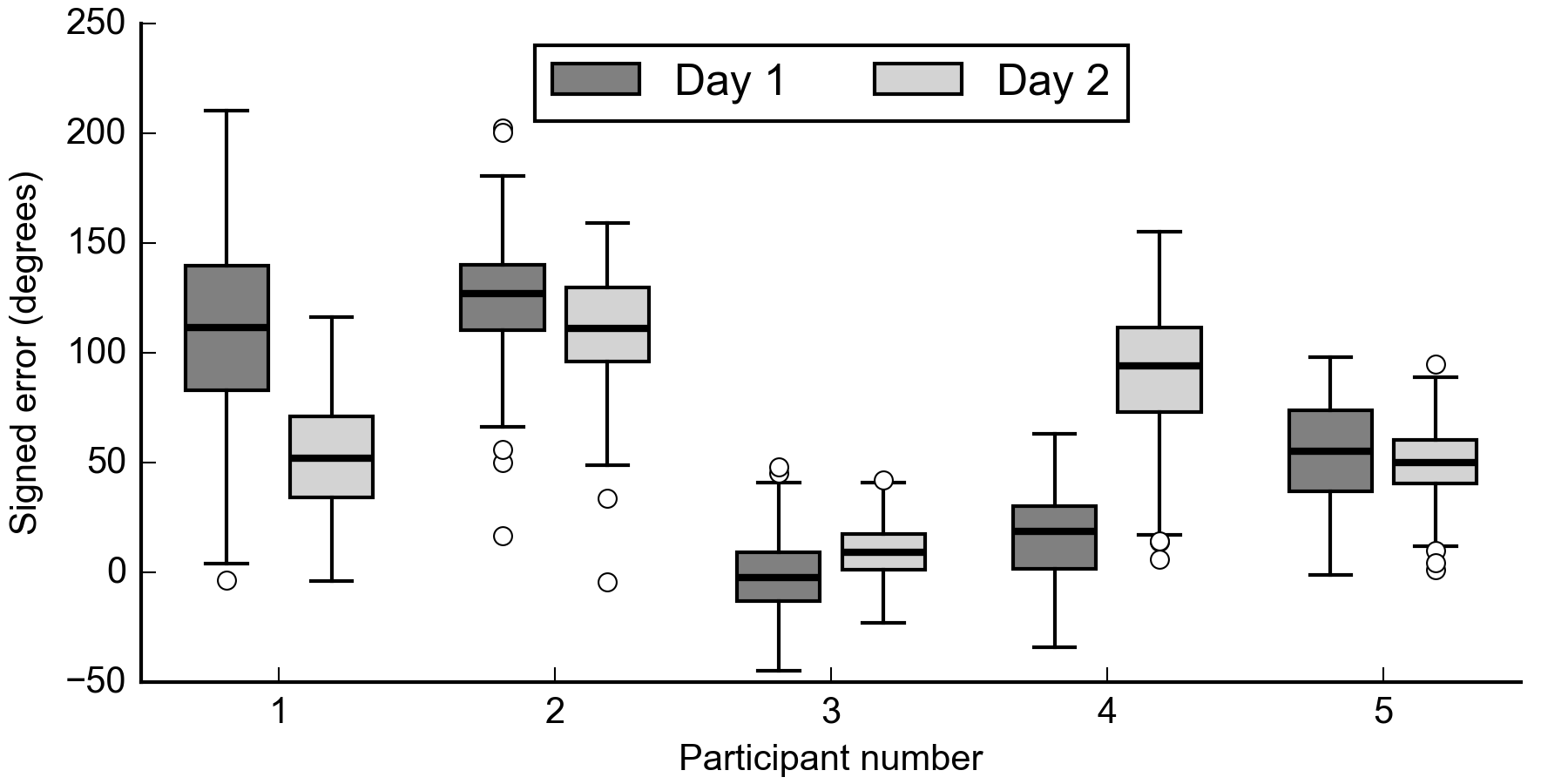 The mean signed error over all participants and all trials was 61.83°, indicating that participants rotated in mean around 60° too far which is a low accuracy. Additionally this suggests, that humans seem to have a bias towards rotating too far, when performing a haptic rotation blindfolded. The precision was also low, since the mean variable error was 20.24°, indicating high variations during equal trials. The results also varied within one participant between two days (see the figure in the left). The figure shows the distribution of the signed errors for each participant for each session. Participant three and five performed with nearly the same accuracy on both days. Contrary to that the accuracy of participant one and four differed a lot between both days. Based on this we decided to improve the experimental procedure for future experiments to make data more comparable (e.g. standardized body or grasping postures). For further information see the related publications.
The mean signed error over all participants and all trials was 61.83°, indicating that participants rotated in mean around 60° too far which is a low accuracy. Additionally this suggests, that humans seem to have a bias towards rotating too far, when performing a haptic rotation blindfolded. The precision was also low, since the mean variable error was 20.24°, indicating high variations during equal trials. The results also varied within one participant between two days (see the figure in the left). The figure shows the distribution of the signed errors for each participant for each session. Participant three and five performed with nearly the same accuracy on both days. Contrary to that the accuracy of participant one and four differed a lot between both days. Based on this we decided to improve the experimental procedure for future experiments to make data more comparable (e.g. standardized body or grasping postures). For further information see the related publications.
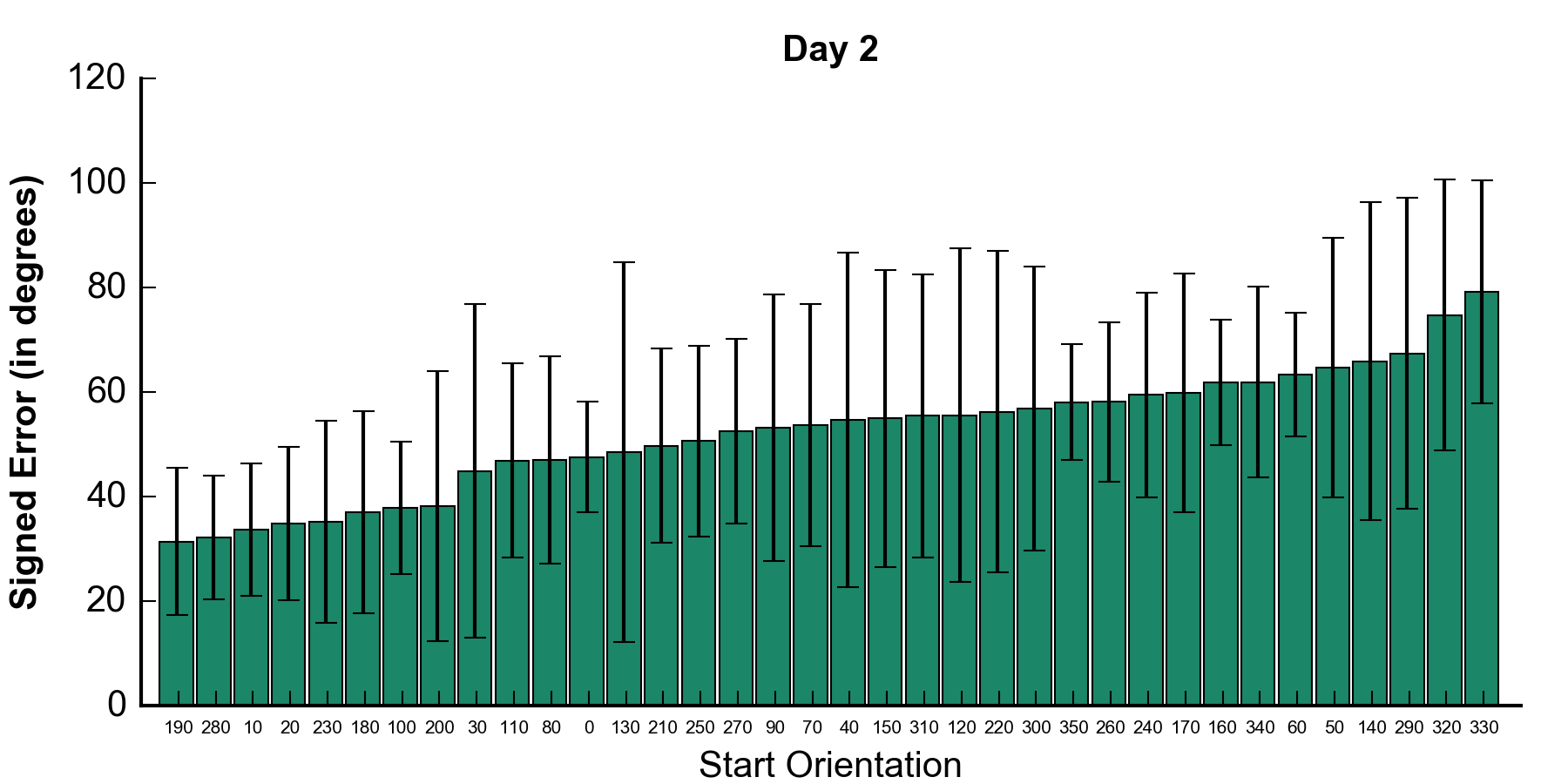 The figure in the right shows the influence of the start orientation for participant one for the second session. The bars are sorted based on their height which refers to the signed errors. The error bars refer to the variable errors. The figure indicates that there are strong differences in the signed errors dependent on the start orientation. When starting at 190° participant one rotated approximately 30° too far, while rotating approximately 70° too far, when starting at 330°. It seems, therefore, that shape features have an impact on the performance. However, the same start orientation lead to different signed errors for different participants or even for the same participant between both sessions. The reason might be that different participants grasped in different ways and sometimes participants changed their grasping strategy between both sessions. So even if round shape might have a specific influence, participants would grasp the round shape at different start orientations. Therefore, this pilot study did not exactly indicate which kind of impact the shapes have. To answer this question we conducted an experiment (see current research).
The figure in the right shows the influence of the start orientation for participant one for the second session. The bars are sorted based on their height which refers to the signed errors. The error bars refer to the variable errors. The figure indicates that there are strong differences in the signed errors dependent on the start orientation. When starting at 190° participant one rotated approximately 30° too far, while rotating approximately 70° too far, when starting at 330°. It seems, therefore, that shape features have an impact on the performance. However, the same start orientation lead to different signed errors for different participants or even for the same participant between both sessions. The reason might be that different participants grasped in different ways and sometimes participants changed their grasping strategy between both sessions. So even if round shape might have a specific influence, participants would grasp the round shape at different start orientations. Therefore, this pilot study did not exactly indicate which kind of impact the shapes have. To answer this question we conducted an experiment (see current research).
The figure in the left 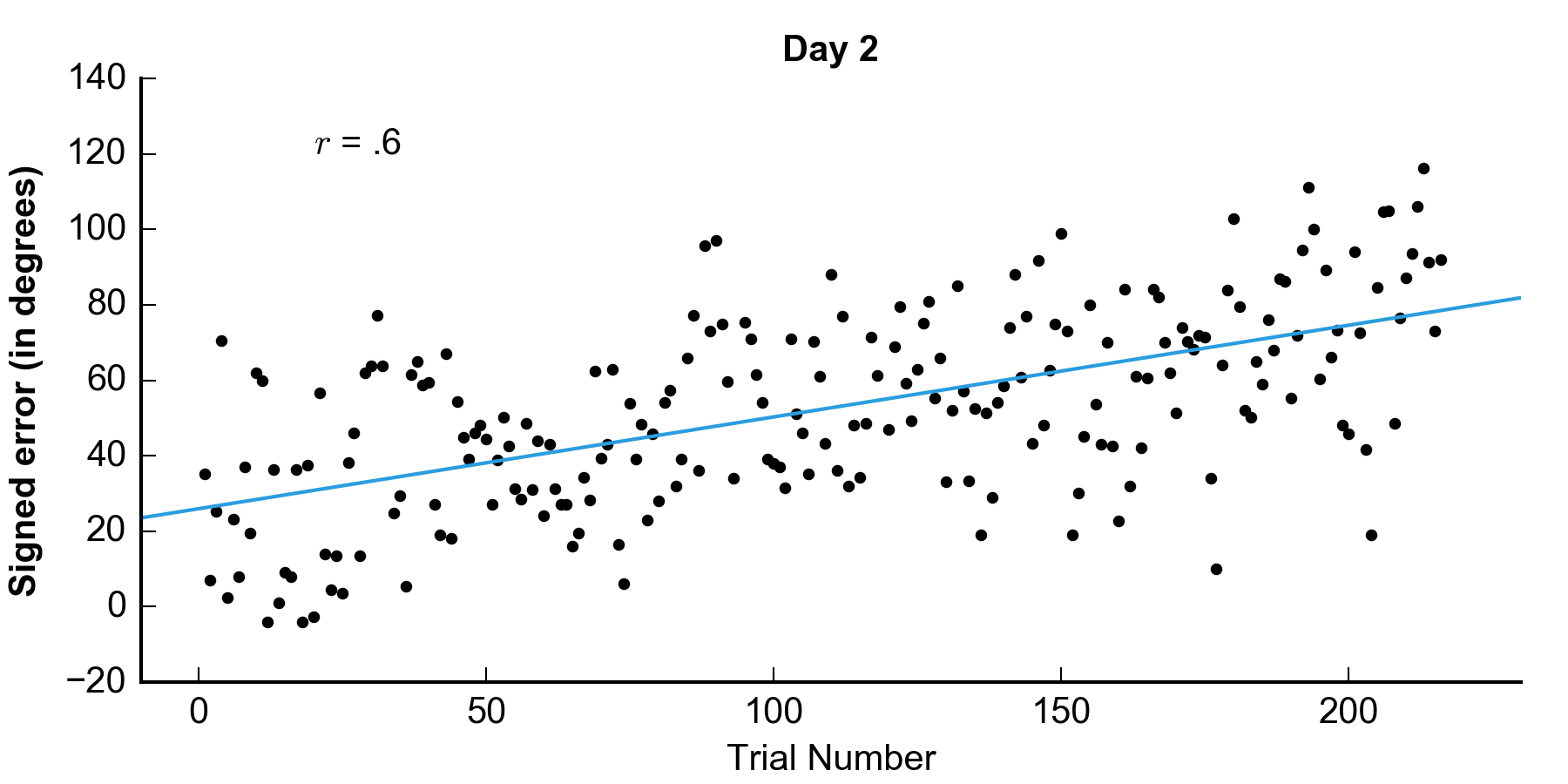 shows again data of participant one on day two. The dots refer to the algebraic difference between the desired rotation angle of 90° and the actual rotation angle dependent on the trial number. The blue line is the regression line indicating that the more trials participant one performed, the bigger the algebraic difference. The mean of the correlations of all participants and both days between the trial number and this algebraic difference was 0.30 which indicates a medium correlation. This means, that there might be a drift of the errors dependent on the time. We concluded, therefore, that the time dependent drift should be taken into account when designing future experiments.
shows again data of participant one on day two. The dots refer to the algebraic difference between the desired rotation angle of 90° and the actual rotation angle dependent on the trial number. The blue line is the regression line indicating that the more trials participant one performed, the bigger the algebraic difference. The mean of the correlations of all participants and both days between the trial number and this algebraic difference was 0.30 which indicates a medium correlation. This means, that there might be a drift of the errors dependent on the time. We concluded, therefore, that the time dependent drift should be taken into account when designing future experiments.
Current research
Our current research analyzed the question, how exactly round, edged and flat shape influence the performance (see related publications).



