Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
REBA+: Robots Exploring Tools
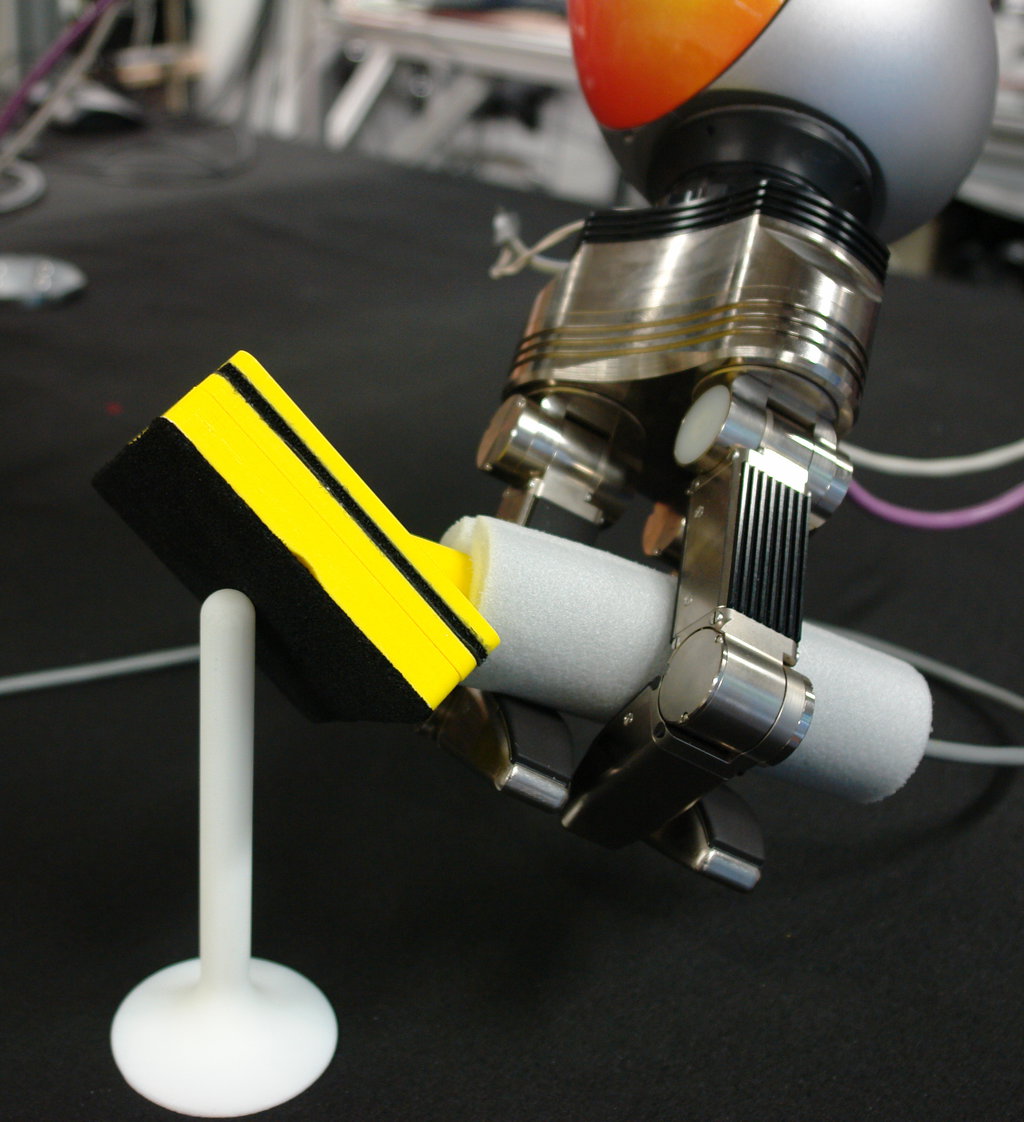 While neuroscientific research is unravelling a remarkable complexity and flexibility of body representations of biological agents during actions and the use of tools, available approaches for representing body schemas for robots still largely lack equally sophisticated, adaptive and dynamically extensible representations. Associated and largely open challenges are rich representations that marry body morphology, control, and the exploitation of redundant degrees of freedom in representations that offer strong priors for rapid learning that in turn support a flexible adaptation and extension of these representations to realize capabilities such as tool use or graceful degradation in case of malfunction of parts of the body tree. To improve on this, we develop methods that will enable robots to flexibly integrate tools into their own body schema and successfully utilize them for given tasks. The picture shows a tactile-sensitive brush providing valuable contact feedback during interaction with the environment. Based on that information we are able to determine the transform from robot end-effector to the tool tip, that is underlying the body-schema extension.
While neuroscientific research is unravelling a remarkable complexity and flexibility of body representations of biological agents during actions and the use of tools, available approaches for representing body schemas for robots still largely lack equally sophisticated, adaptive and dynamically extensible representations. Associated and largely open challenges are rich representations that marry body morphology, control, and the exploitation of redundant degrees of freedom in representations that offer strong priors for rapid learning that in turn support a flexible adaptation and extension of these representations to realize capabilities such as tool use or graceful degradation in case of malfunction of parts of the body tree. To improve on this, we develop methods that will enable robots to flexibly integrate tools into their own body schema and successfully utilize them for given tasks. The picture shows a tactile-sensitive brush providing valuable contact feedback during interaction with the environment. Based on that information we are able to determine the transform from robot end-effector to the tool tip, that is underlying the body-schema extension.


