Brain-computer interfaces (BCI) provide an alternative communication channel that bypasses all muscular functions by directly decoding brain activity. When using electroencephalography (EEG) to acquire brain signals, they are non-invasive, affordable and safe. Having originally been designed as a communication tool for patients with severe physical disabilities, e.g. paraplegia or locked-in state, the application areas have grown in recent years. Our research follows a two fold approach. Firstly, we aim at improving the reliability and the communication speed of the systems. Furthermore, we investigate the usage of BCI as a research tool, in particular to study human-machine and human-robot interaction in more real-world like settings. To this end, BCI allows to investigate cognitive processes during the interaction, in almost real time and without having to rely solely on group-level data.
read more »






















 The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors.
The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors. Acquiring a profound knowledge about the cognitive processes underlying human-robot interaction is essential to better exploit the measurable components for brain-robot interfaces. The better the processes are understood, the better the EEG components originating from these processes can be used. A systematic evaluation of these components in connection with human-robot interaction is missing until today. Hence, it appears to be worthwhile to take a closer and impartial look at what is really happening on the cognitive level, as far as determinable by EEG signals.
Acquiring a profound knowledge about the cognitive processes underlying human-robot interaction is essential to better exploit the measurable components for brain-robot interfaces. The better the processes are understood, the better the EEG components originating from these processes can be used. A systematic evaluation of these components in connection with human-robot interaction is missing until today. Hence, it appears to be worthwhile to take a closer and impartial look at what is really happening on the cognitive level, as far as determinable by EEG signals.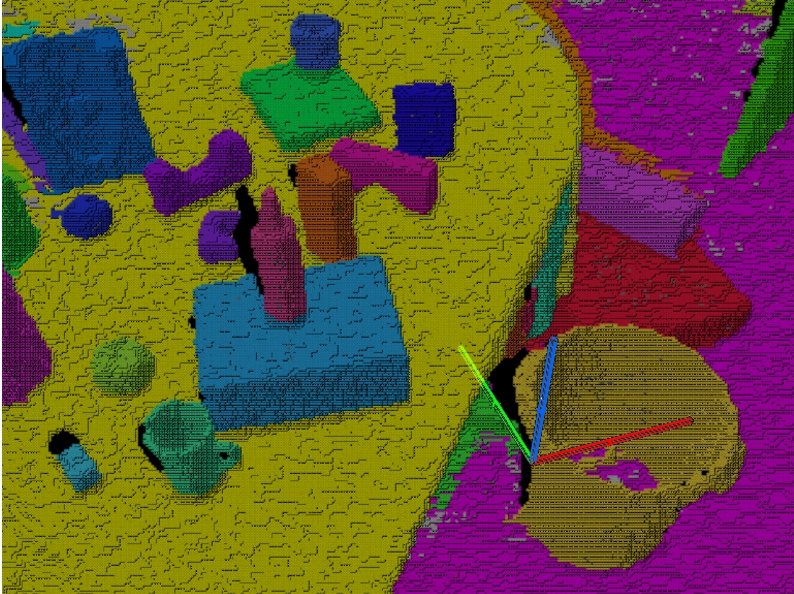 A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.
A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.