Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
A Brain-Robot Interface for Controlling ASIMO
Introduction
Acquiring a profound knowledge about the cognitive processes underlying human-robot interaction is essential to better exploit the measurable components for brain-robot interfaces. The better the processes are understood, the better the EEG components originating from these processes can be used. A systematic evaluation of these components in connection with human-robot interaction is missing until today. Hence, it is worthwhile to take a closer and impartial look at what is really happening on the cognitive level, as far as determinable by EEG signals.
Brain-Robot Interfacing
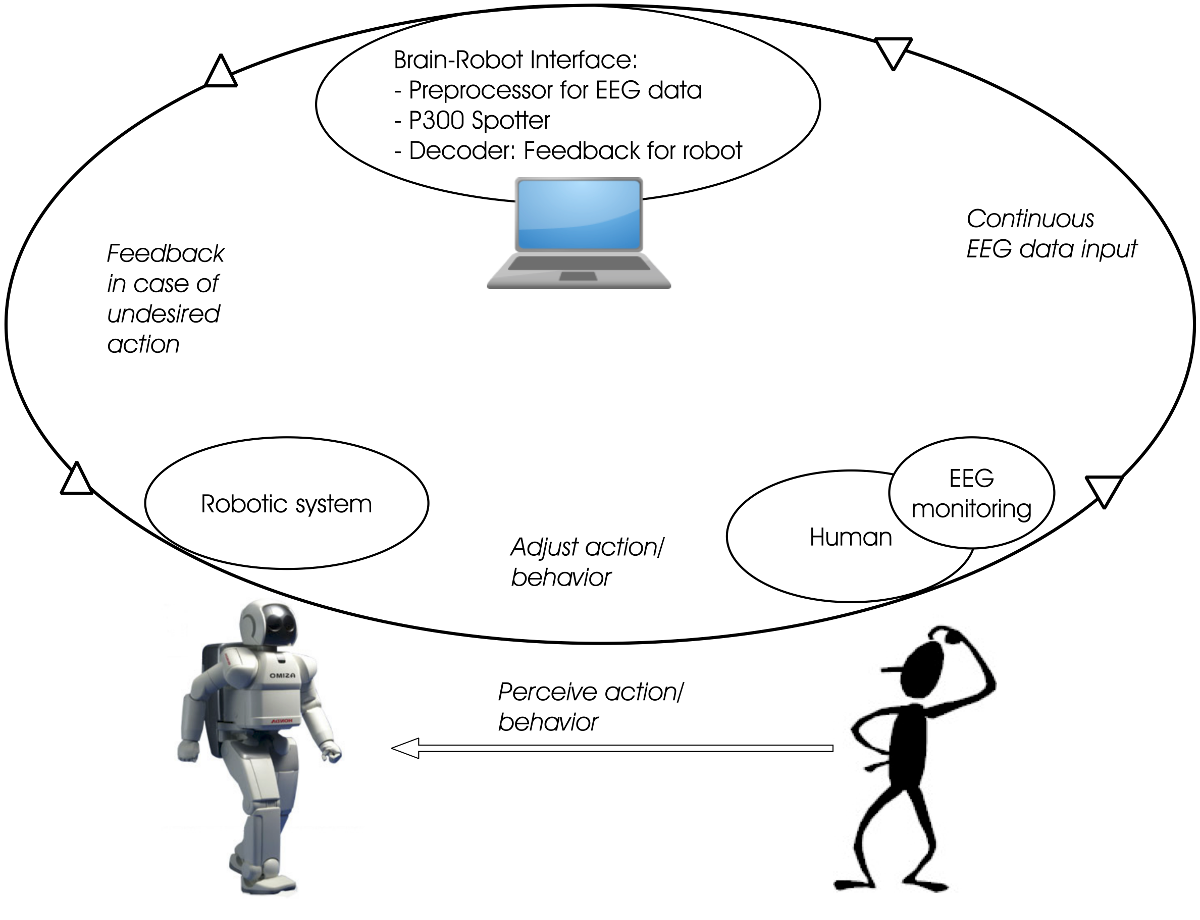
When creating brain-robot interfaces it does not make sense to fully control every detail in the robot's action but to rely on the capabilities the robot already has. Advanced robots like the Asimo already have a large (and growing) set of actions they can perform autonomously. Instead of replacing such autonomous actions by direct control through a brain-interface it is desired to intervene when the robot performs actions that are either erroneous or not desired by the human interaction partner.
Paradigms for Human-Robot Interaction
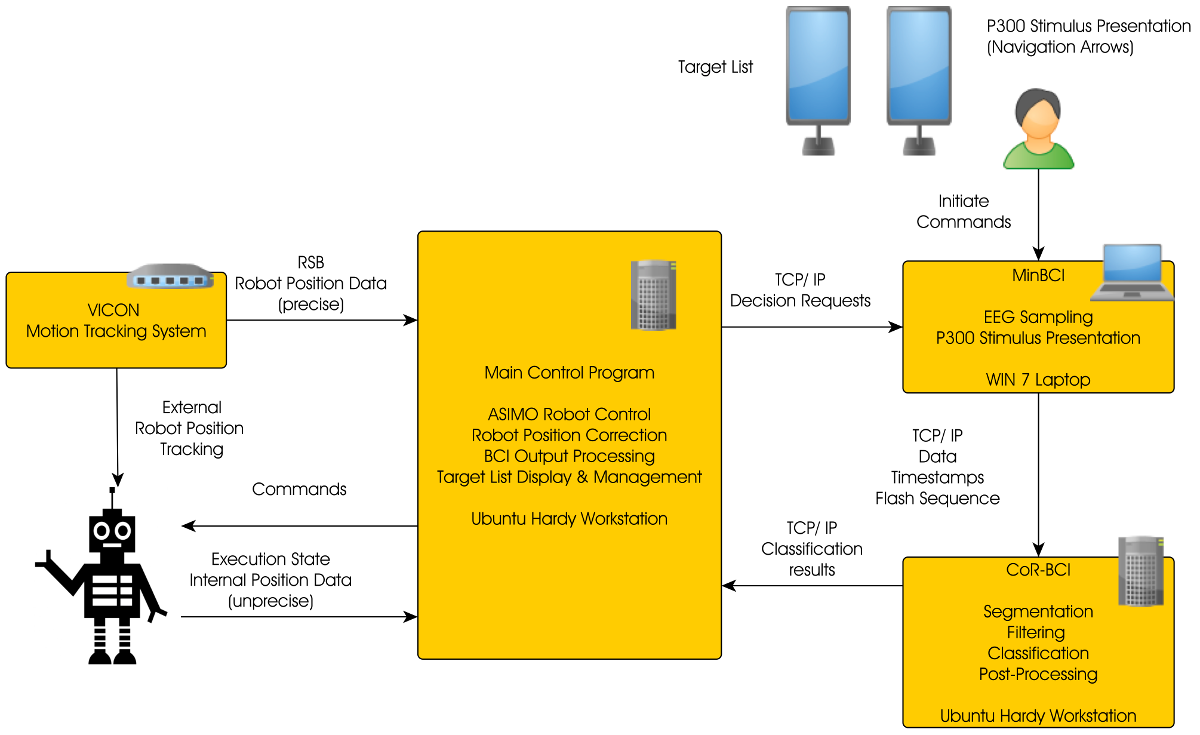
We aim at developping paradigms for human-robot interaction suited for EEG experiments. An interaction scenario with a real robot poses a set of new challenges compared to standard brain-computer interface settings. We use additional data sources like eye tracking and motion tracking to increase the level of information available about the experimental scene. The figure shows the setup currently used in out lab.