 What principles enable rapid and adaptive alignment in coordination?
What principles enable rapid and adaptive alignment in coordination?
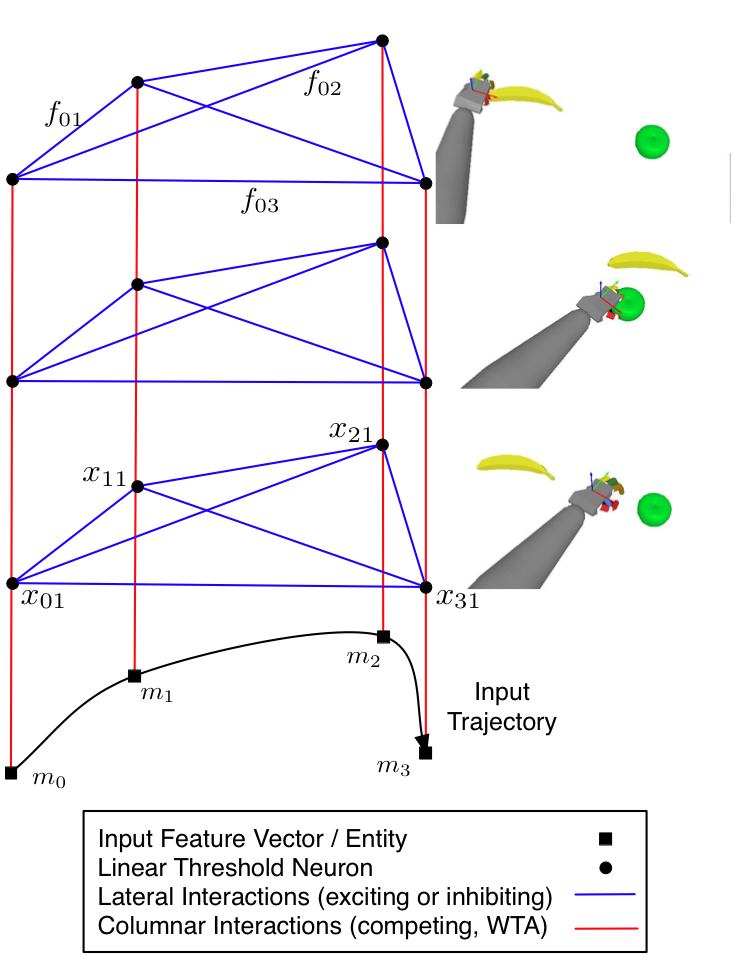
This project investigates Gestalt principles and their generalization from the perceptual into the action/cooperation domain for modeling adaptive alignment and its functional replication in human-robot cooperation. Departing from learning algorithms for dynamic Gestalt formation in layered recurrent networks (Competitive Layer Model CLM), we develop a hybrid, hierarchical architecture for adaptive alignment in cooperation that integrates elements from connectionist and symbol-based representations. We evaluate its performance in a human-robot cooperation scenario involving two anthropomorphic hands mounted on a bimanual robot platform.
read more »






















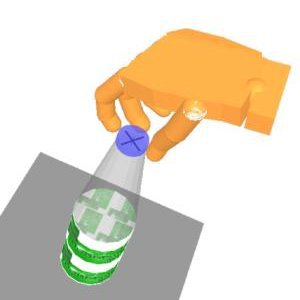
 The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors.
The Intelligent Object, short iObject+, is the second generation instrumented object, developed for research on human and robotic grasping and manipulation. It estimates its pose in space from an IMU sensor and measures interaction forces on its surface via an array of tactile sensors.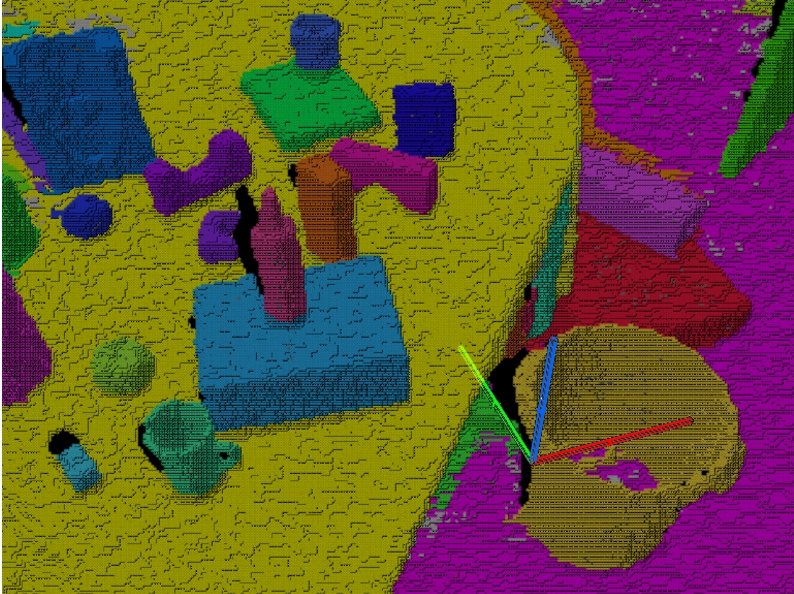 A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.
A major pre-requisite for many robotics tasks is to identify and localize objects within scenes. Our model-free approaches to scene segmentation employs RGBD cameras to segmented highly cluttered scenes in real-time (30 Hz). To this end, we first identify smooth object surfaces and subsequently combine them to form object hypotheses employing basic heuristics such has convexity, shape alignment and color similarity.