Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Gestalt Learning as a Basis for Adaptive Alignment
 What principles enable rapid and adaptive alignment in coordination?
What principles enable rapid and adaptive alignment in coordination?
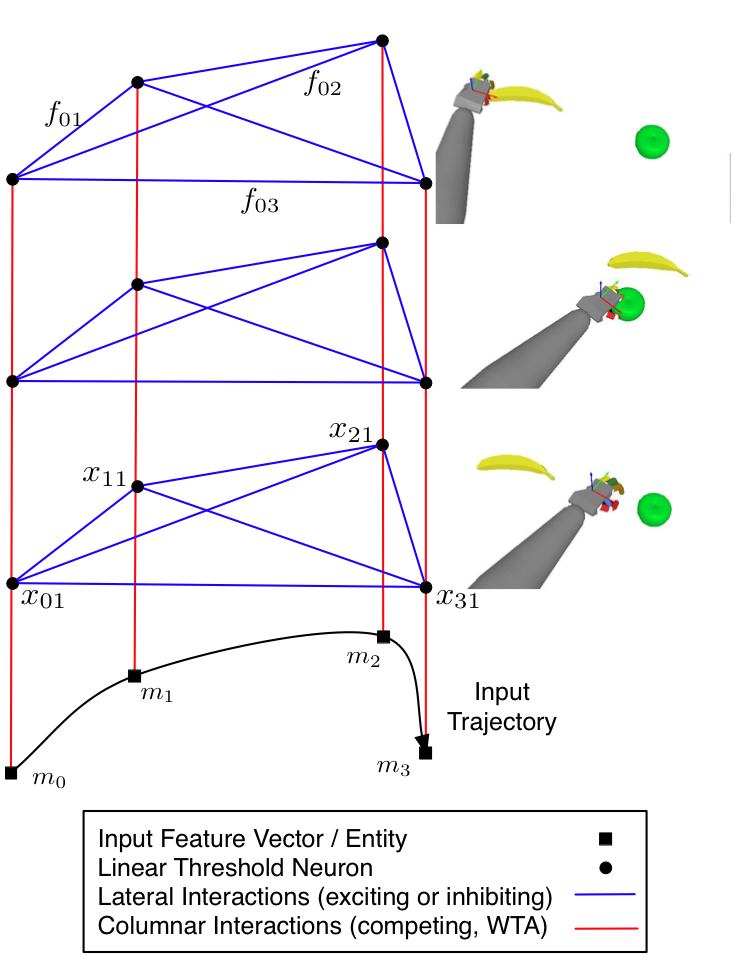
This project investigates Gestalt principles and their generalization from the perceptual into the action/cooperation domain for modeling adaptive alignment and its functional replication in human-robot cooperation. Departing from learning algorithms for dynamic Gestalt formation in layered recurrent networks (Competitive Layer Model CLM), we develop a hybrid, hierarchical architecture for adaptive alignment in cooperation that integrates elements from connectionist and symbol-based representations. We evaluate its performance in a human-robot cooperation scenario involving two anthropomorphic hands mounted on a bimanual robot platform.

