Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Shadow Hand Tactile Fingertip
 This 12-taxel fingertip sensor provides highly sensitive normal-force sensing for our Shadow Robot Hands - fully integrated with the mechanical and electrical design of the hand.
This 12-taxel fingertip sensor provides highly sensitive normal-force sensing for our Shadow Robot Hands - fully integrated with the mechanical and electrical design of the hand.
Employing laser structuring technology (LDS) 3D-shaped plastic molds are activated for later copper coating creating the conductive tracks of the sensor electrode. A piezo-resistive foam covering the electrode turns variations of normal forces applied to the sensor into changes of resistance. The signal acquisition electronics is integrated in the inner cavity of the electrode, directly connecting to the SPI bus of the Shadow Hand.
Sensor Characteristics
Taxel Layout
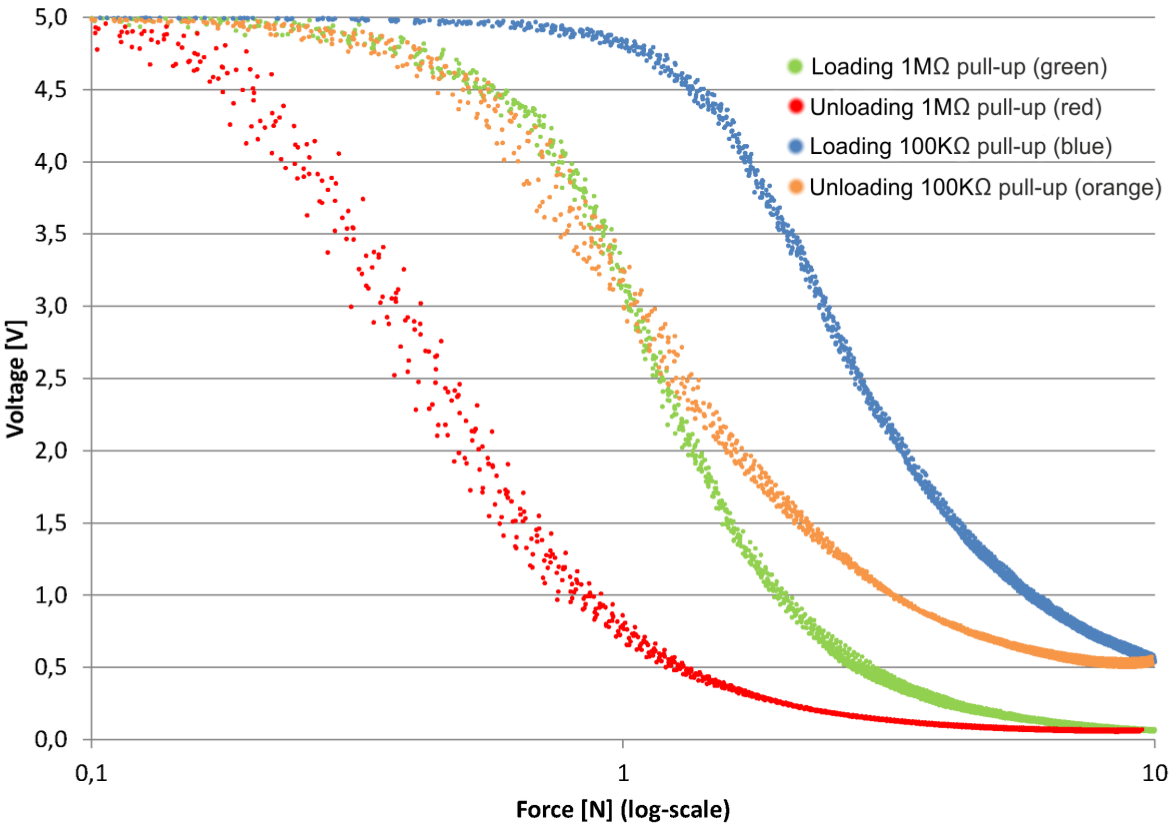
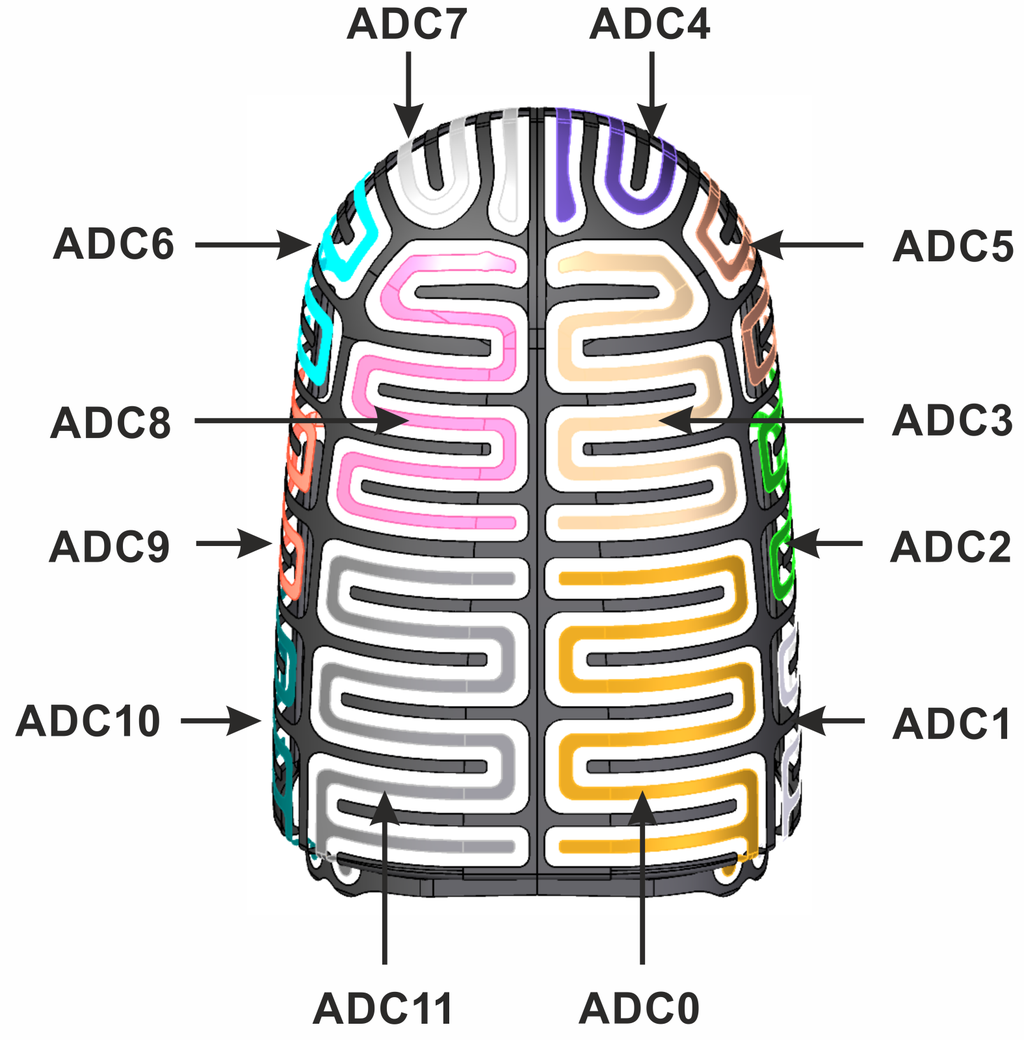 The taxels, sized about 5mm, are uniformly distributed on the fingertip - four taxels cover the main contact area and eight taxels spread around the circumference to detect lateral contact. The limitation to 12 taxels is due to the limitation of the Shadow Hand's communication bus. The taxel's ADCs are sampled at a rate of 750Hz and published to the host at a rate of 1kHz. The meander-like structure of the electrodes increases sensitivity because the gap between both electrodes is maximised.
The taxels, sized about 5mm, are uniformly distributed on the fingertip - four taxels cover the main contact area and eight taxels spread around the circumference to detect lateral contact. The limitation to 12 taxels is due to the limitation of the Shadow Hand's communication bus. The taxel's ADCs are sampled at a rate of 750Hz and published to the host at a rate of 1kHz. The meander-like structure of the electrodes increases sensitivity because the gap between both electrodes is maximised.


