Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
WearHap: Wearable haptics for Humans and Robots
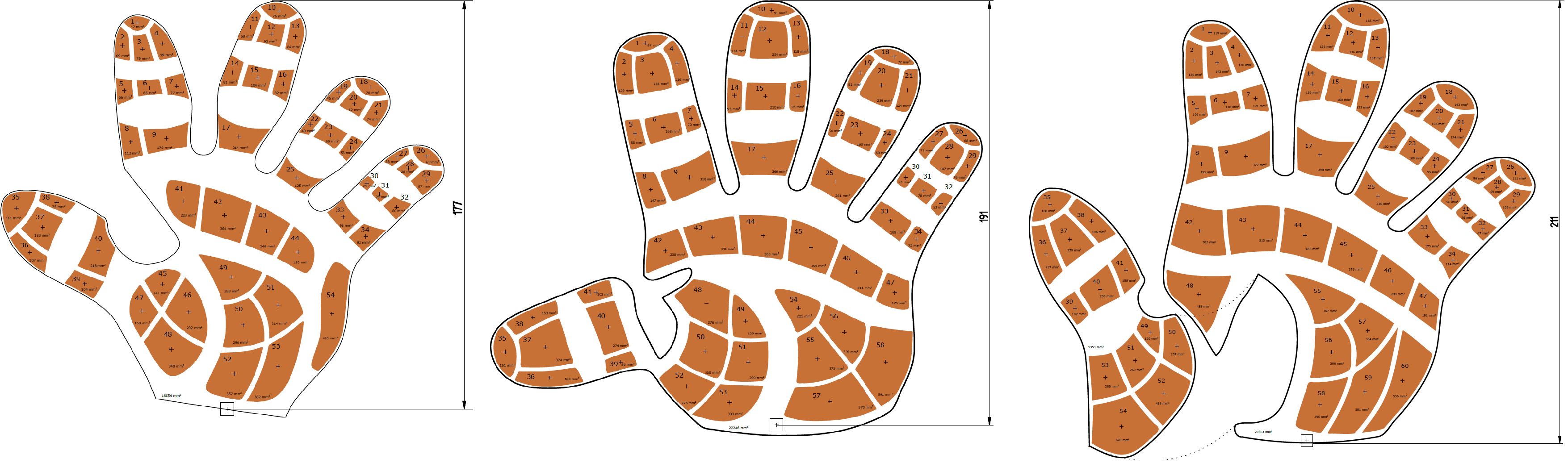
 Within the EU-Project WearHap, we develop different wearable devices, most notably a tactile-sensing glove, based on our elastic, fabric-based tactile-sensor-technology. The Tactile Glove provides normal force/pressure measurement in approx 60 taxels spread across the whole palmar side of the hand and allows to record human interaction forces while grasping or manipulating objects.
Within the EU-Project WearHap, we develop different wearable devices, most notably a tactile-sensing glove, based on our elastic, fabric-based tactile-sensor-technology. The Tactile Glove provides normal force/pressure measurement in approx 60 taxels spread across the whole palmar side of the hand and allows to record human interaction forces while grasping or manipulating objects.
Sensitivity and spatial resolution are chosen deliberately to match conditions like space and processing bandwidth. The distinguishable feature of the elastic sensor technology is its flexibility that allows to cover 3D-shaped objects with arbitrary perimeter. This results in better sensor coverage, better durability and higher agility when wearing the glove.
Currently we provide three different sizes of gloves ranging from M to L, the layouts are depicted in following.
In addition to tactile sensing we tested the integration of posture-sensors like bend sensors from Uni Pisa and the Cyberglove one. These can be used for rounding out posture data form optical tracking apparats like Vicon.


The same technology is also used to cover proximal and middle phalanges of our Shadow Robot Hands. In contrast to the fingertips, where we are able to integrate high-resolution, MID-base sensing electrodes, these phalanges are already highly packed with tendon routing, sensors, and mechanics, such that only the very thin fabrics-based sensing technology is applicable. The following pictures illustrate the overall coverage of the robot hands with taxels.



