Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Haptic Puzzles with Modular Haptic Stimulus Board (MHSB)
 With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning. To this end, we have devised a novel stimulus framework, Modular Haptic Stimulus Board (MHSB), a board obtained by a composition of elementatry three-dimensional shapes. CAD models of the MHSB are available under the following link https://pub.uni-bielefeld.de/record/2944641
With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning. To this end, we have devised a novel stimulus framework, Modular Haptic Stimulus Board (MHSB), a board obtained by a composition of elementatry three-dimensional shapes. CAD models of the MHSB are available under the following link https://pub.uni-bielefeld.de/record/2944641
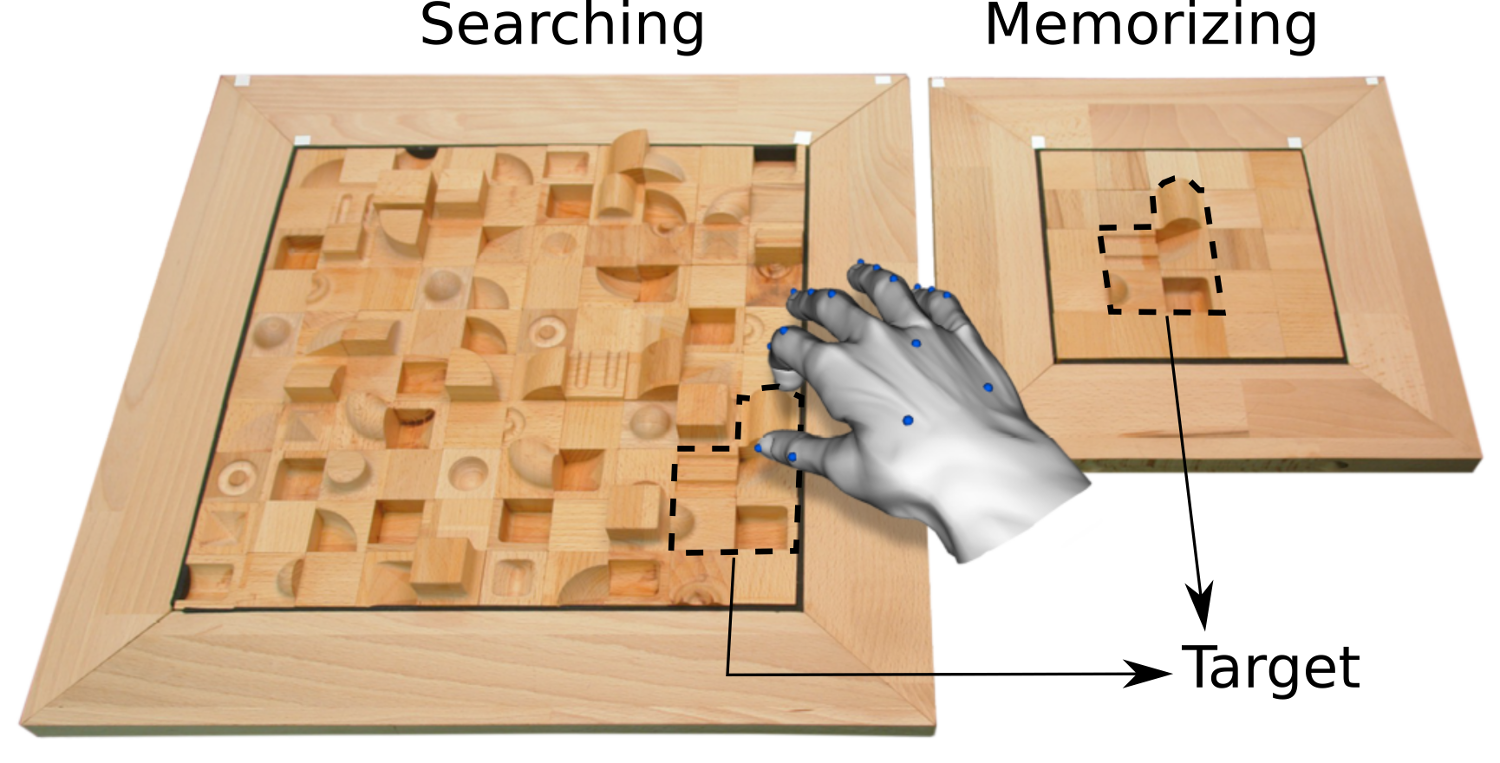
The above illustrates an example of a haptic search scenario in which a study participant was asked to 1) memorize a given target shape pattern (right board), and to 2) search for the above-mentioned target embedded in a search environment (left board). We base our analysis on the multimodal data recorded during the experimental trials, such as haptic and kinematic trajectories of the hand and fingers, high-frequent video, audio.

Visualization of a trial is available under this link: http://www.techfak.uni-bielefeld.de/persons/abarch/videos/td_viz.ogv


