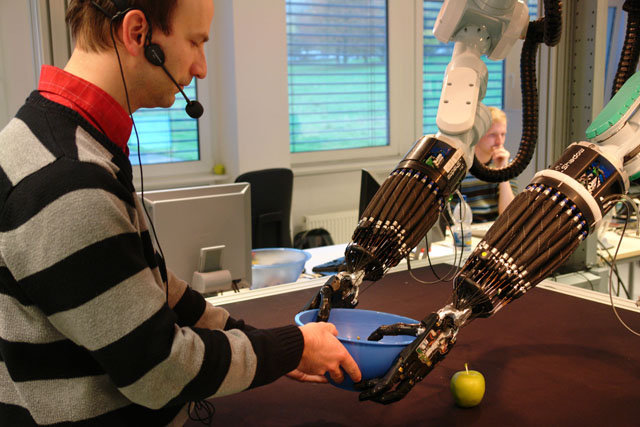
Cognitive Robotics draws from classical robotics, artificial intelligence, cognitive science and neurobiology to elucidate and synthesize aspects of action-oriented intelligence. Using a robot system with a multi-fingered manipulator and an active binocular camera head we investigate strategies how to coordinate the actions of such system with those of a human partner. We focus on dextrous manipulation of objects, combining tactile and visual sensing, the joining of action primitives into action sequences and the development of learning algorithms.
read more »






















 Self-organizing maps (SOMs) are a class of unsupervised learning methods that arrange data samples in a low-dimensional, non-linear manifold in a topology-preserving fashion, i.e. neighbored samples will be mapped to neighbored regions in the manifold. Thus they are well-suited for non-linear dimensionality reduction and visualization.
Self-organizing maps (SOMs) are a class of unsupervised learning methods that arrange data samples in a low-dimensional, non-linear manifold in a topology-preserving fashion, i.e. neighbored samples will be mapped to neighbored regions in the manifold. Thus they are well-suited for non-linear dimensionality reduction and visualization.  The Competitive Layer Model (CLM) is a recurrent neural network architecture for dynamic feature binding and relaxation labeling, which was introduced by Helge Ritter in 1990. It can be used for various tasks in perceptual grouping, image segmentation, texture segmentation und classification. The network architecture consists of several topographically ordered layers within which lateral interactions control the binding of features into groups whereas competitve interactions between layers cause the segmentation and labeling of these groups. The stable states of the dynamics can be shown to be minima of a binding energy and implement proper groupings in the sense that each feature is uniquely assigned to a group.
The Competitive Layer Model (CLM) is a recurrent neural network architecture for dynamic feature binding and relaxation labeling, which was introduced by Helge Ritter in 1990. It can be used for various tasks in perceptual grouping, image segmentation, texture segmentation und classification. The network architecture consists of several topographically ordered layers within which lateral interactions control the binding of features into groups whereas competitve interactions between layers cause the segmentation and labeling of these groups. The stable states of the dynamics can be shown to be minima of a binding energy and implement proper groupings in the sense that each feature is uniquely assigned to a group.