 We develop a 3D VR serious game to integrate valid haptic performance testing in highly adaptable and motivating virtual game scenarios. One goal is to offer stroke patients who need to improve or relearn their proprioceptive and tactile abilities an appealing and motivating tool. It allows them to monitor their progress in a more detailed manner than traditional methods, to select a suitable level of task difficulty, and potentially to improve their self-efficacy. For that purpose we combined multiple devices to a hardware framework creating a touchable virtual world. A set of scenarios is designed where players encounter different haptic discrimination or manipulation challenges in order to evaluate detailed hand and finger movements.
We develop a 3D VR serious game to integrate valid haptic performance testing in highly adaptable and motivating virtual game scenarios. One goal is to offer stroke patients who need to improve or relearn their proprioceptive and tactile abilities an appealing and motivating tool. It allows them to monitor their progress in a more detailed manner than traditional methods, to select a suitable level of task difficulty, and potentially to improve their self-efficacy. For that purpose we combined multiple devices to a hardware framework creating a touchable virtual world. A set of scenarios is designed where players encounter different haptic discrimination or manipulation challenges in order to evaluate detailed hand and finger movements.
read more »























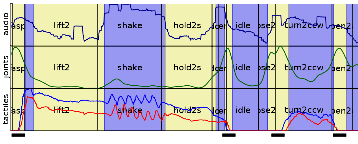 In this project we investigate approaches for unsupervised segmentation of interaction sequences based on multimodal data. The proposed procedure estimates segment borders across all modalities in a single pass.
In this project we investigate approaches for unsupervised segmentation of interaction sequences based on multimodal data. The proposed procedure estimates segment borders across all modalities in a single pass. To download the CAD models of the MHSB please use the following link:
To download the CAD models of the MHSB please use the following link:  Learning to play piano is a highly demanding activity, which is characterized by a high mental load. To reduce the mental load and, by doing so, to accelerate the learning process, we pursue to use exoskeleton Dexmo.
Learning to play piano is a highly demanding activity, which is characterized by a high mental load. To reduce the mental load and, by doing so, to accelerate the learning process, we pursue to use exoskeleton Dexmo.