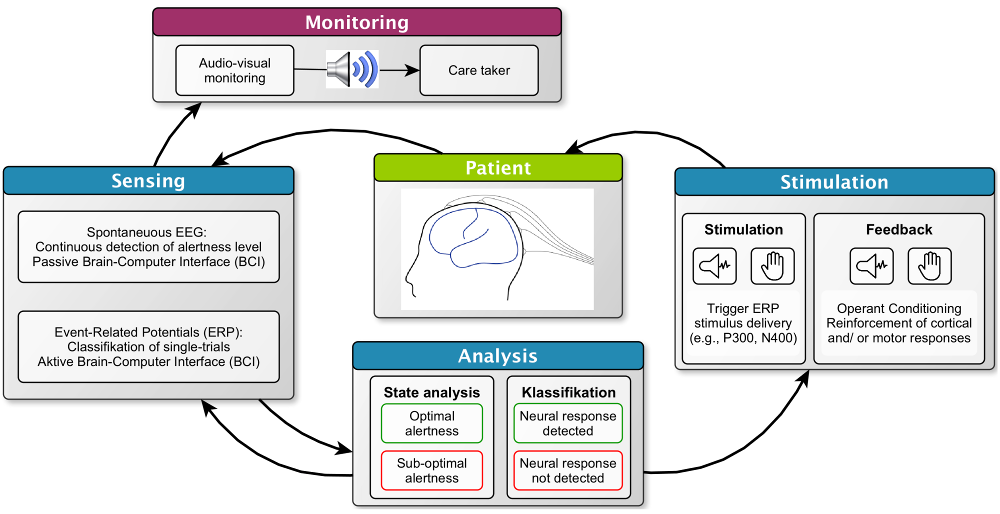
 Every year thousands of people in Germany suffer severe traumatic brain injuries resulting in a permanent loss of consciousness and the ability to communicate. Our project aims at combining innovative interaction concepts with novel technology to improve the every day life of patients, care takers and relatives. We develop an adaptive, multi-modal training and communication system based on neural activity (EEG) and other sensor data to reinforce the patient's residual reactions and build up basal communication possibilities.
Every year thousands of people in Germany suffer severe traumatic brain injuries resulting in a permanent loss of consciousness and the ability to communicate. Our project aims at combining innovative interaction concepts with novel technology to improve the every day life of patients, care takers and relatives. We develop an adaptive, multi-modal training and communication system based on neural activity (EEG) and other sensor data to reinforce the patient's residual reactions and build up basal communication possibilities.
Within CITEC the project is a collaboration of the Neuroinformatics Group, the Ambient Intelligence Group and the Affective Neuroscience Group.
Overview of the NeuroCommTrainer approach:
External Project Partners:

read more »






















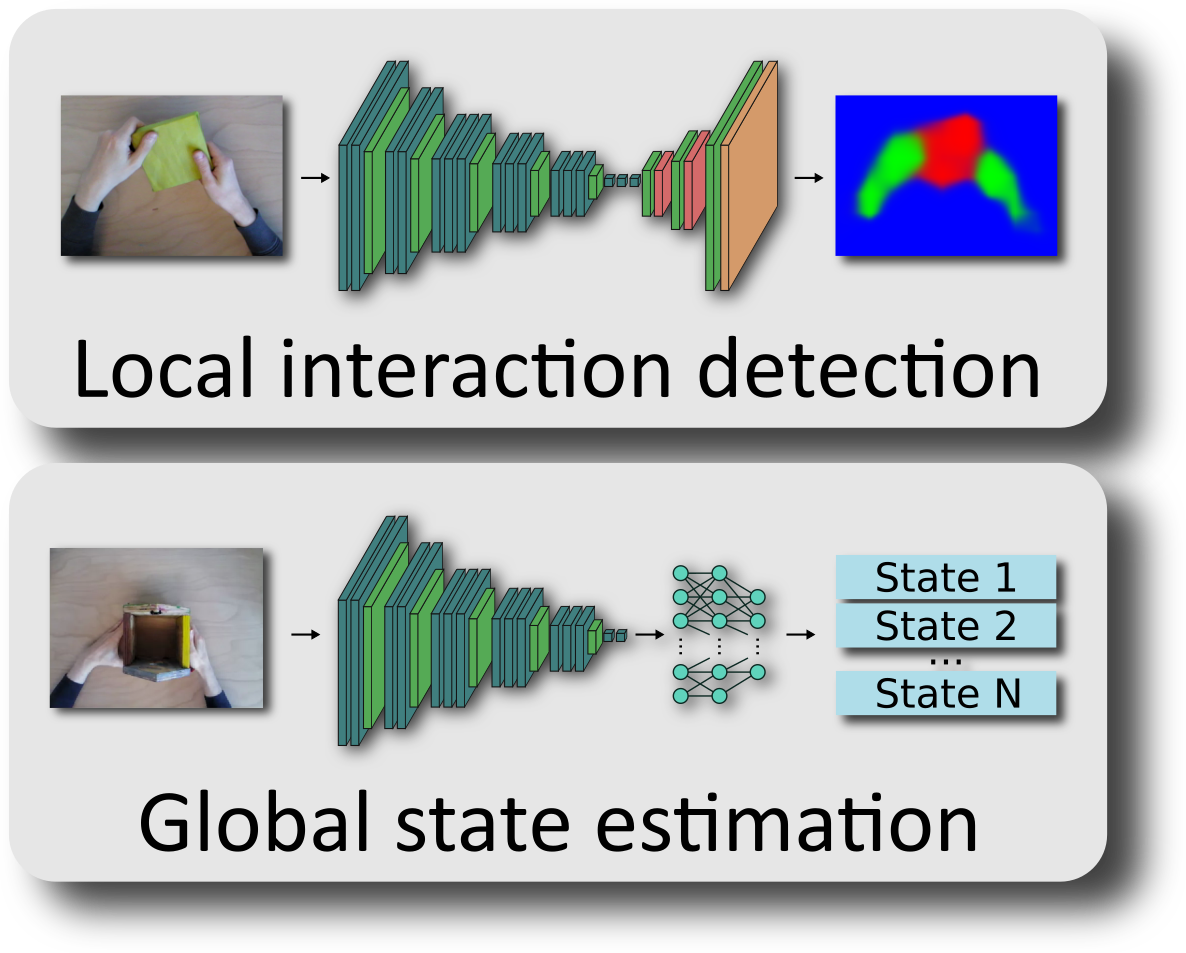 The visual detection and recognition of human actions by technical systems is a fundamental problem with many applications the human-computer interaction domain. Activities involving hand-object interactions and action sequences in goal-oriented tasks, such as manufacturing work, pose a particular challenge. We use deep learning to detect and recognize such actions in real-time, and we propose an assistance system that provides the user with feedback and guidance based on the recognized actions.
The visual detection and recognition of human actions by technical systems is a fundamental problem with many applications the human-computer interaction domain. Activities involving hand-object interactions and action sequences in goal-oriented tasks, such as manufacturing work, pose a particular challenge. We use deep learning to detect and recognize such actions in real-time, and we propose an assistance system that provides the user with feedback and guidance based on the recognized actions.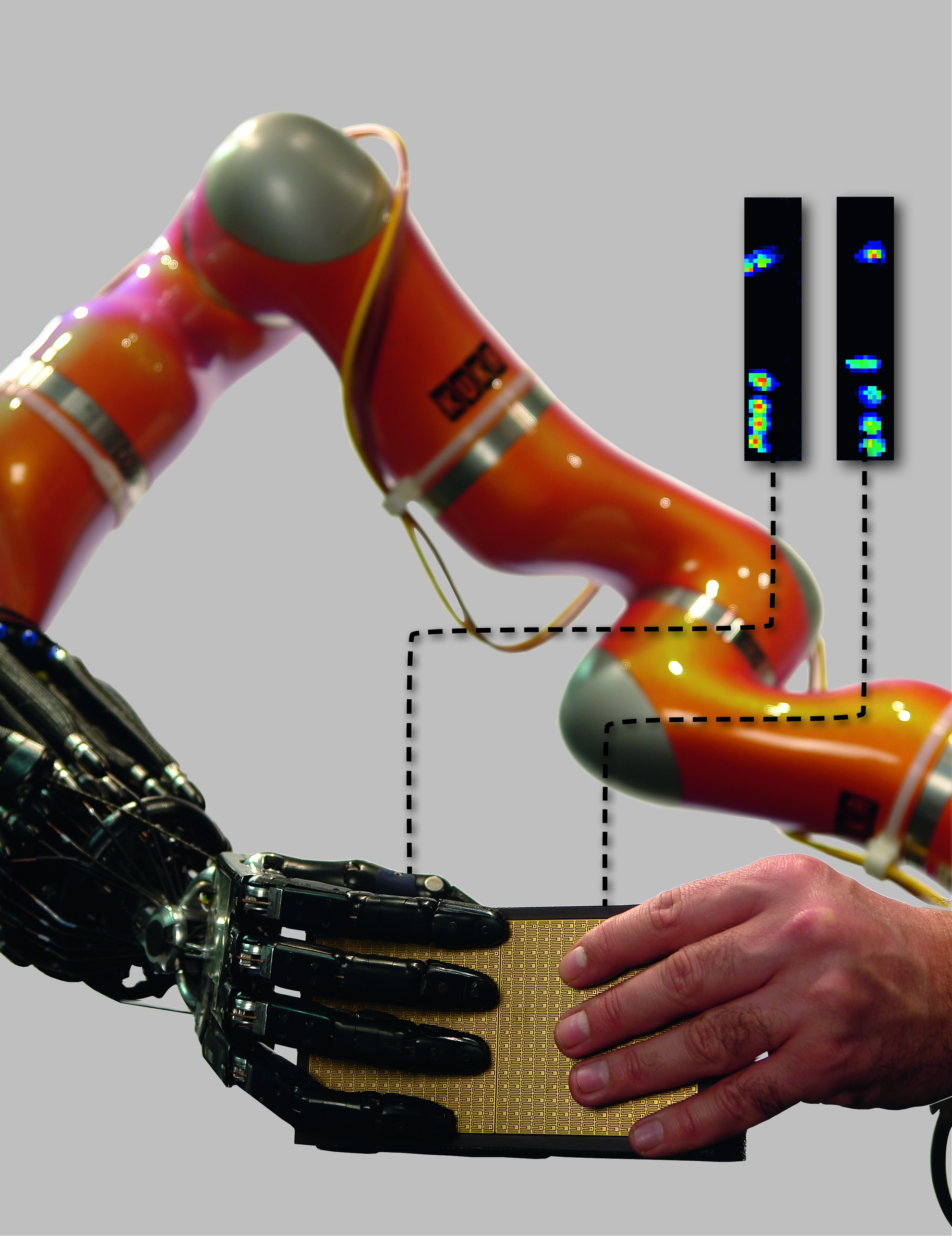 Because of the complex anatomy of the human hand, in the absence of external constraints a large number of postures and force combinations can be used to attain a stable grasp.
Because of the complex anatomy of the human hand, in the absence of external constraints a large number of postures and force combinations can be used to attain a stable grasp. The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task.
The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task. With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning.
With the help of haptic puzzles, we investigate goal-oriented haptic exploration, search, learning and memory in complex 3D environments in order to both; enable multi-fingered robots with a sense of touch, and gain more insights into human meta-learning.