Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Human grasping forces and positions synergies
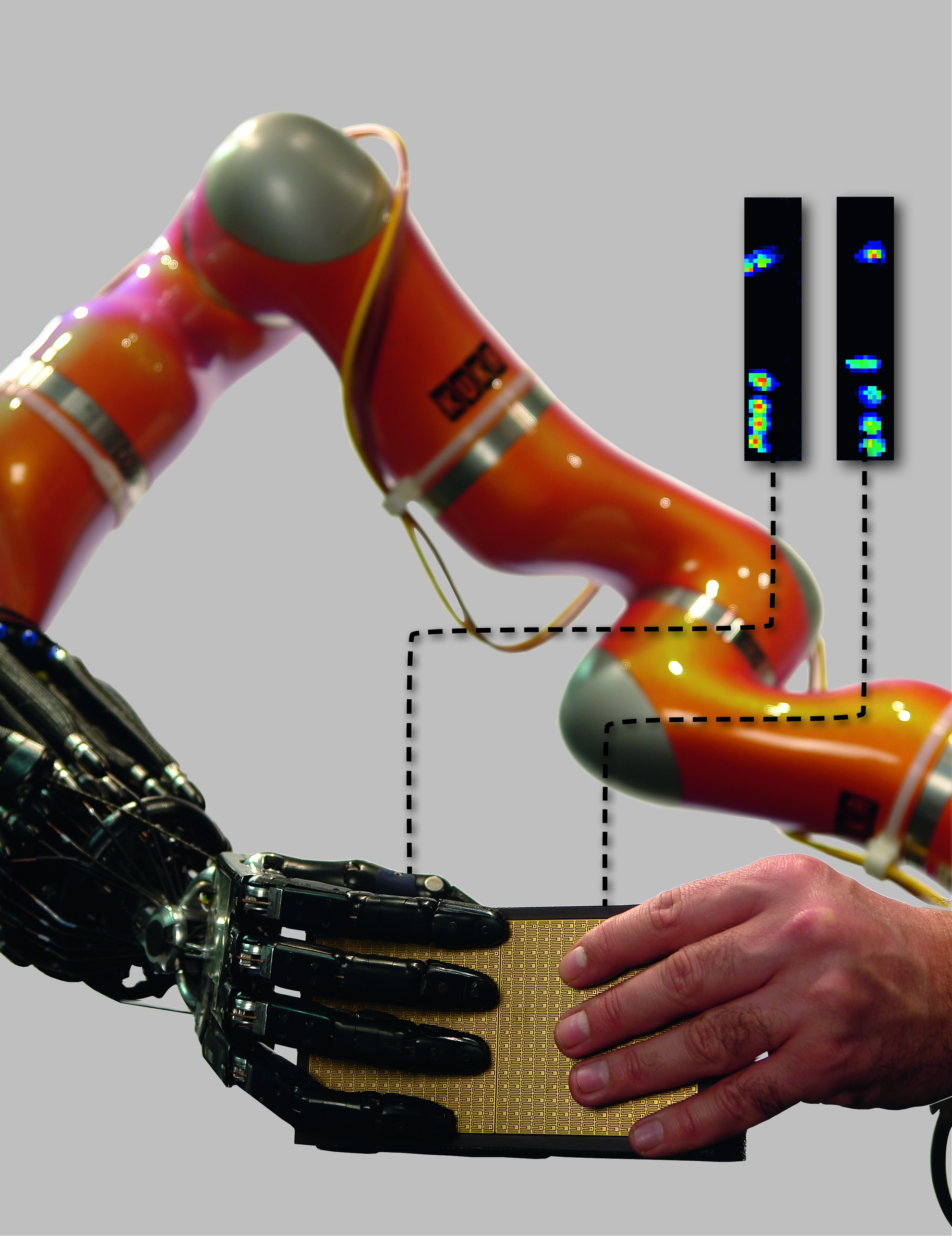 Because of the complex anatomy of the human hand, in the absence of external constraints a large number of postures and force combinations can be used to attain a stable grasp. Motor synergies provide a viable strategy to solve this problem of motor redundancy. In this study, we exploited the technical advantages of an innovative sensorized object to study unconstrained hand grasping within the theoretical framework of motor synergies. By doing so, we aim to bridge the knowledge between neuroscience and robotics to better understand sensorimotor of the human motor control and to develop accurate models for the interaction tasks with the external environment that can be verified and applied on robotic platform
Because of the complex anatomy of the human hand, in the absence of external constraints a large number of postures and force combinations can be used to attain a stable grasp. Motor synergies provide a viable strategy to solve this problem of motor redundancy. In this study, we exploited the technical advantages of an innovative sensorized object to study unconstrained hand grasping within the theoretical framework of motor synergies. By doing so, we aim to bridge the knowledge between neuroscience and robotics to better understand sensorimotor of the human motor control and to develop accurate models for the interaction tasks with the external environment that can be verified and applied on robotic platform


