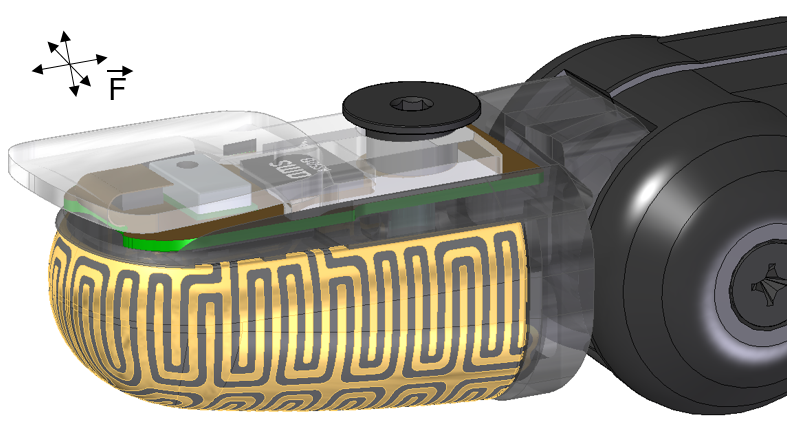
 The human fingernail turns out to be very important when it comes to picking coins, scratching off stickers, or simply probing surfaces. To endow robots with similar capabilities, in this project, we are developing a sensorized fingernail for mechanical hands, i.e. robotic or prostetic hands, capable of measuring vibratory and static contact forces. High sensitivity combined with robustness for daily use are the key features describing our proposed design.
The human fingernail turns out to be very important when it comes to picking coins, scratching off stickers, or simply probing surfaces. To endow robots with similar capabilities, in this project, we are developing a sensorized fingernail for mechanical hands, i.e. robotic or prostetic hands, capable of measuring vibratory and static contact forces. High sensitivity combined with robustness for daily use are the key features describing our proposed design.
read more »






















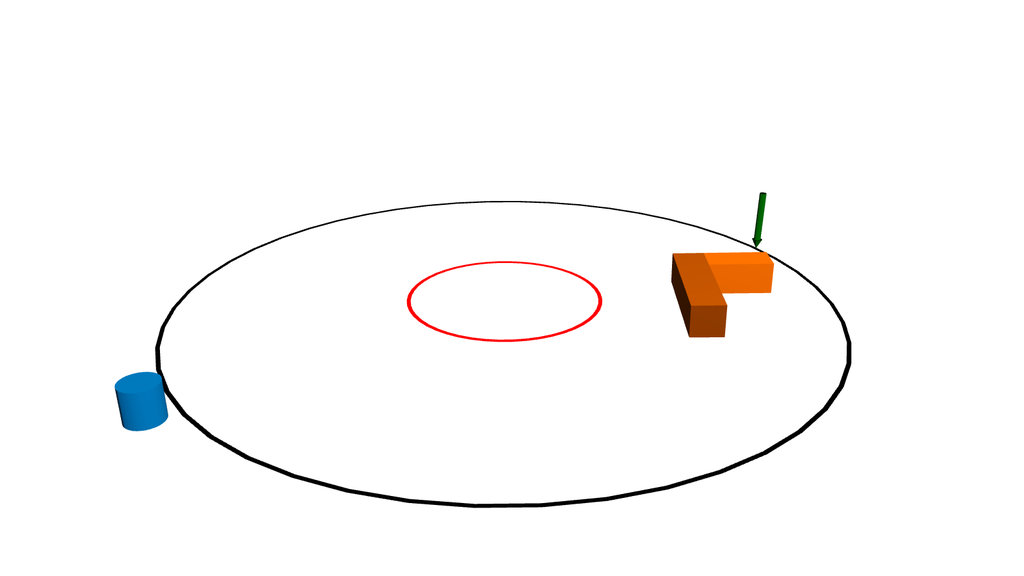
 Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.
Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands. 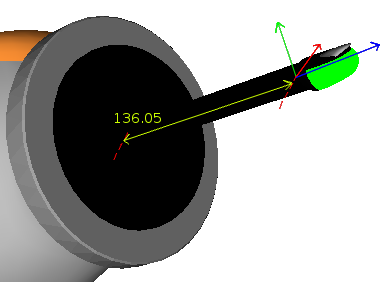 The tactile-sensitive poking stick has mounted our
The tactile-sensitive poking stick has mounted our