 In the last decades, many researchers have used evolutionary algorithms to adapt the topology and connection weights of recurrent neural networks for various control tasks. This has become a useful machine learning technique. Because handling large genomes is difficult, however, these neural networks typically contain only a few neurons. If the genome contains a recipe for construction of the network instead of the network itself, it can be much smaller. We have developed a method than can exactly do this, and performs very well on a number of different problems.
In the last decades, many researchers have used evolutionary algorithms to adapt the topology and connection weights of recurrent neural networks for various control tasks. This has become a useful machine learning technique. Because handling large genomes is difficult, however, these neural networks typically contain only a few neurons. If the genome contains a recipe for construction of the network instead of the network itself, it can be much smaller. We have developed a method than can exactly do this, and performs very well on a number of different problems.
read more »























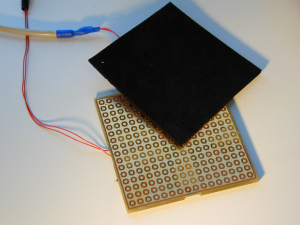 The spatio-temporal contact pattern during manipulation is a valuable source of information about object identity and object state, especially in uncertain environments. Using a bimanual robot manipulator setup with two 256 "pixel" touch sensor arrays, the present project is creating a "haptic pattern database" and investigates machine learning techniques to analyse the information contents of different haptic features and to extract identity and state information from haptic patterns. A closely connected goal are dynamic control strategies for contact movements with deformable or plastic objects, such as clay.
The spatio-temporal contact pattern during manipulation is a valuable source of information about object identity and object state, especially in uncertain environments. Using a bimanual robot manipulator setup with two 256 "pixel" touch sensor arrays, the present project is creating a "haptic pattern database" and investigates machine learning techniques to analyse the information contents of different haptic features and to extract identity and state information from haptic patterns. A closely connected goal are dynamic control strategies for contact movements with deformable or plastic objects, such as clay.
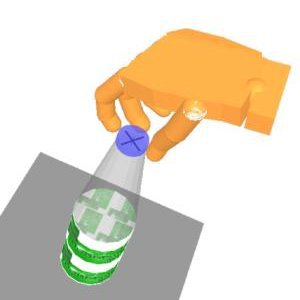
 Unlike most existing approaches to the grasp selection task for anthropomorphic robot hands, this vision-based project aims for a solution, which does not depend on an a-priori known 3D shape of the object. Instead it uses a decomposition of the object view (obtained from mono or stereo cameras) into local, grasping-relevant shape primitives, whose optimal grasp type and approach direction are known or learned beforehand. Based on this decomposition a list of possible grasps can be generated and ordered according to the anticipated overall grasp quality.
Unlike most existing approaches to the grasp selection task for anthropomorphic robot hands, this vision-based project aims for a solution, which does not depend on an a-priori known 3D shape of the object. Instead it uses a decomposition of the object view (obtained from mono or stereo cameras) into local, grasping-relevant shape primitives, whose optimal grasp type and approach direction are known or learned beforehand. Based on this decomposition a list of possible grasps can be generated and ordered according to the anticipated overall grasp quality.