 The Competitive Layer Model (CLM) is a recurrent neural network architecture for dynamic feature binding and relaxation labeling, which was introduced by Helge Ritter in 1990. It can be used for various tasks in perceptual grouping, image segmentation, texture segmentation und classification. The network architecture consists of several topographically ordered layers within which lateral interactions control the binding of features into groups whereas competitve interactions between layers cause the segmentation and labeling of these groups. The stable states of the dynamics can be shown to be minima of a binding energy and implement proper groupings in the sense that each feature is uniquely assigned to a group.
The Competitive Layer Model (CLM) is a recurrent neural network architecture for dynamic feature binding and relaxation labeling, which was introduced by Helge Ritter in 1990. It can be used for various tasks in perceptual grouping, image segmentation, texture segmentation und classification. The network architecture consists of several topographically ordered layers within which lateral interactions control the binding of features into groups whereas competitve interactions between layers cause the segmentation and labeling of these groups. The stable states of the dynamics can be shown to be minima of a binding energy and implement proper groupings in the sense that each feature is uniquely assigned to a group.
read more »






















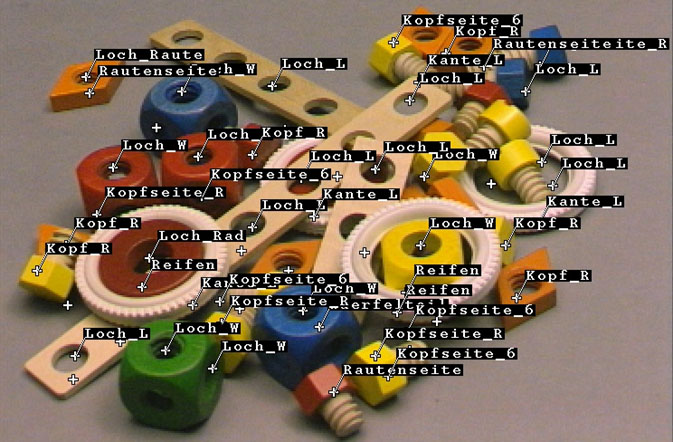 In this project we are developing a system that is aimed to overcome a major limitation of current computer vision: The specialization of vision architectures to one special task. In this approach, artificial neural networks (ANN) are applied to learn the appearance of objects from samples images. By this means, the costly designing of geometric object models can be avoided. This work is realized in the framework NESSY (NEural viSion SYstem), a software package that allows an easy design and visualization of image processing systems.
In this project we are developing a system that is aimed to overcome a major limitation of current computer vision: The specialization of vision architectures to one special task. In this approach, artificial neural networks (ANN) are applied to learn the appearance of objects from samples images. By this means, the costly designing of geometric object models can be avoided. This work is realized in the framework NESSY (NEural viSion SYstem), a software package that allows an easy design and visualization of image processing systems.  Active Vision considers vision as a process of active data aquisition, i.e. actively pointing the cameras towards interesting regions within the scene, eventually changing zoom as well.
Active Vision considers vision as a process of active data aquisition, i.e. actively pointing the cameras towards interesting regions within the scene, eventually changing zoom as well. 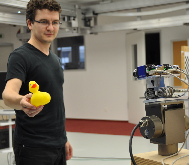 An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object.
An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object. Self-organizing maps (SOMs) are a class of unsupervised learning methods that arrange data samples in a low-dimensional, non-linear manifold in a topology-preserving fashion, i.e. neighbored samples will be mapped to neighbored regions in the manifold. Thus they are well-suited for non-linear dimensionality reduction and visualization.
Self-organizing maps (SOMs) are a class of unsupervised learning methods that arrange data samples in a low-dimensional, non-linear manifold in a topology-preserving fashion, i.e. neighbored samples will be mapped to neighbored regions in the manifold. Thus they are well-suited for non-linear dimensionality reduction and visualization.  In the near future, more and more people will need assistance in everyday tasks while they still want to maintain a high degree of self-reliance. Cognitive robot servants will fulfill their individual needs. One promising way develop robots with a sufficiently high adaptability is to equip cognitive robots with task learning abilities, that lets them learn a task from demonstrations of naive (non-expert) users. This paradigm is widely known as Programming by Demonstration (PbD) or Imitation Learning.
In the near future, more and more people will need assistance in everyday tasks while they still want to maintain a high degree of self-reliance. Cognitive robot servants will fulfill their individual needs. One promising way develop robots with a sufficiently high adaptability is to equip cognitive robots with task learning abilities, that lets them learn a task from demonstrations of naive (non-expert) users. This paradigm is widely known as Programming by Demonstration (PbD) or Imitation Learning.