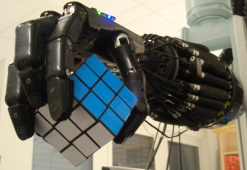
 We gradually increase our manual competence by exploring manual interaction spaces for many different kinds of objects. This is an active process that is very different from passive perception of "samples". The availability of humanoid robot hands offers the opportunity to investigate different strategies for such active exploration in realistic settings. In the present project, the investigation of such strategies shall be pursued from the perspective of „multimodal proprioception:“ correlating joint angles, partial contact information from touch sensors and joint torques as well as visual information about changes in finger and object position in such a way as to make predictions about "useful aspects" for shaping the ongoing interaction.
We gradually increase our manual competence by exploring manual interaction spaces for many different kinds of objects. This is an active process that is very different from passive perception of "samples". The availability of humanoid robot hands offers the opportunity to investigate different strategies for such active exploration in realistic settings. In the present project, the investigation of such strategies shall be pursued from the perspective of „multimodal proprioception:“ correlating joint angles, partial contact information from touch sensors and joint torques as well as visual information about changes in finger and object position in such a way as to make predictions about "useful aspects" for shaping the ongoing interaction.
read more »






















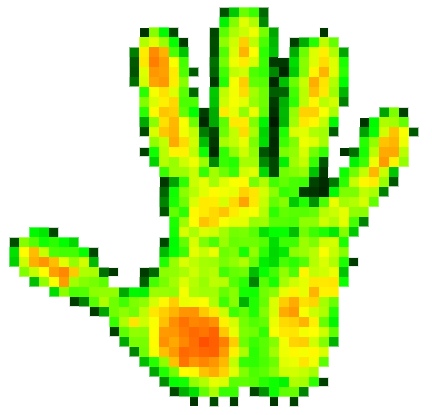 Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
Providing the sense of touch to robots is one of the most important challenges to advance towards more complex manipulation capabilities in robotics. We are developing tactile sensors for use in robot hands, sensorized objects, and human data gloves.
Futhermore we are developing Tactile Servoing methods exploiting tactile sensors directly for robot control.
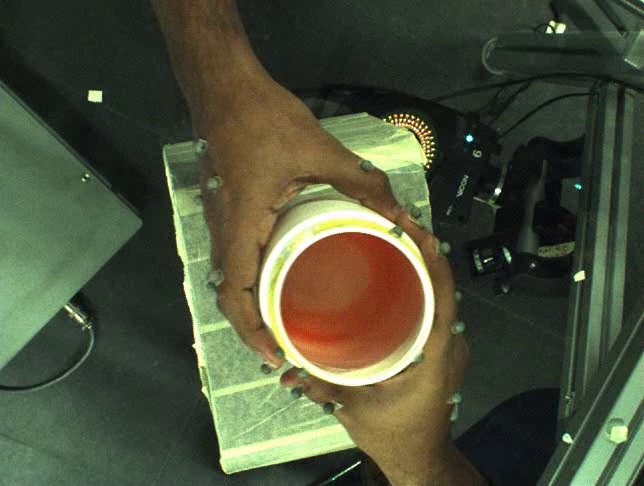 Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.
Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.