Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Tactile Exploration Database
 In manipulation tasks, humans instinctively use the tactile sense. Especially the human hand utilizes a large number of different mechanoreceptors to adapt the grasp force to all kinds of objects and conditions. The importance of tactile perception in human manipulation tasks suggests, that also robots need a sense of touch to be able to handle objects nearly as versed as humans.
In manipulation tasks, humans instinctively use the tactile sense. Especially the human hand utilizes a large number of different mechanoreceptors to adapt the grasp force to all kinds of objects and conditions. The importance of tactile perception in human manipulation tasks suggests, that also robots need a sense of touch to be able to handle objects nearly as versed as humans.
Research in this area is still very much focused on technical aspects of the sensor design. There is still a huge gap between the human tactile sense and what artificial sensors are able of. In the Neuroinformatics Group, we are working on different methods to process the often imperfect tactile data, for example in object recognition tasks. Also, more recently, research on the improvement of existing tactile sensor designs was promoted.
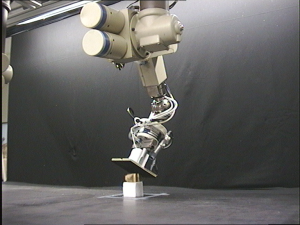 The foundation of most work on the algorithmic side of that area is a comprehensive tactile database of 16 different objects. Those objects were probed in different angles and positions and enable researchers to focus on the development of different algorithms rather than exploiting researchers with the rather cumbersome work of data acquisition. Up until now, a object recognition task and an analysis of different tactile features and their contribution for recognition tasks have been done.
The foundation of most work on the algorithmic side of that area is a comprehensive tactile database of 16 different objects. Those objects were probed in different angles and positions and enable researchers to focus on the development of different algorithms rather than exploiting researchers with the rather cumbersome work of data acquisition. Up until now, a object recognition task and an analysis of different tactile features and their contribution for recognition tasks have been done.
Object Recognition was done by applying a three-stage classification architecture (VPL) first proposed by Heidemann and Ritter. The VPL- classifier uses a vector quantisation and a principal component analysis to generate a feature vector set. The creation of the feature vector is completly unsupervised. In the third stage, a Neural Net of Type Local Linear Map is trained in a supervised manner. Very good classification results could be reached.
More recent work copes with the finding of the features in tactile data that yields the most information to the scanner. It is important, especially with better tactile sensors with more tactile elements and higher temporal resolution to find an effective dimension reduction. Since tactile sensing always involves direct interaction with the environment, the systems have to be responsive and able to handle everything in real time.
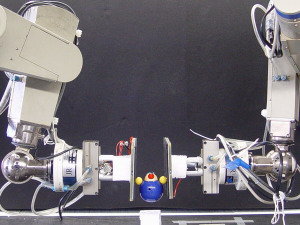 Besides the tactile database, reinforcement learning in a bimanual grasp task was successfully applied. Although the sampling rate of the sensor was very limited, the optimal grasp force for different objects could be learned by the robot.
Besides the tactile database, reinforcement learning in a bimanual grasp task was successfully applied. Although the sampling rate of the sensor was very limited, the optimal grasp force for different objects could be learned by the robot.


- Login to post comments