 In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
read more »






















 We gradually increase our manual competence by exploring manual interaction spaces for many different kinds of objects. This is an active process that is very different from passive perception of "samples". The availability of humanoid robot hands offers the opportunity to investigate different strategies for such active exploration in realistic settings. In the present project, the investigation of such strategies shall be pursued from the perspective of „multimodal proprioception:“ correlating joint angles, partial contact information from touch sensors and joint torques as well as visual information about changes in finger and object position in such a way as to make predictions about "useful aspects" for shaping the ongoing interaction.
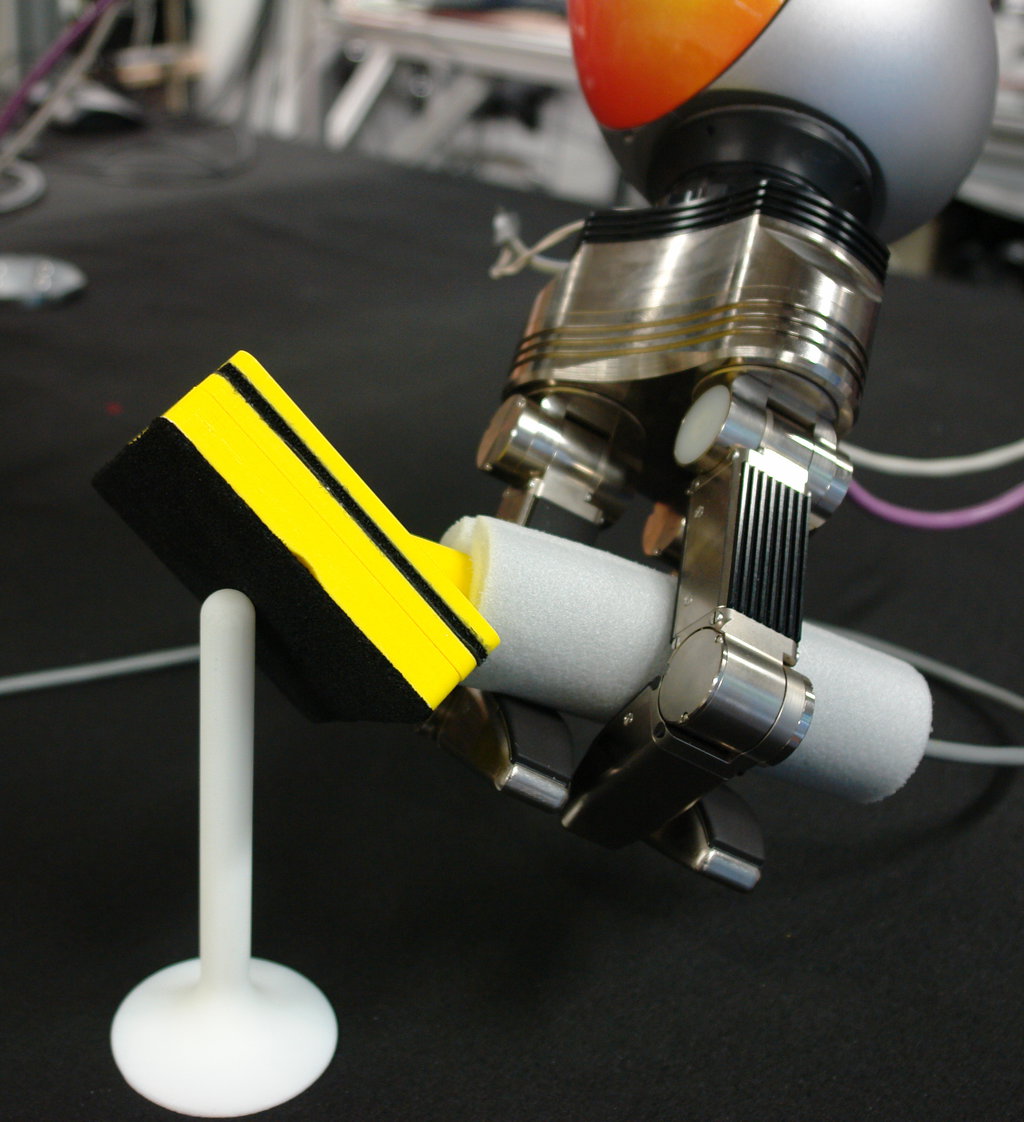
We gradually increase our manual competence by exploring manual interaction spaces for many different kinds of objects. This is an active process that is very different from passive perception of "samples". The availability of humanoid robot hands offers the opportunity to investigate different strategies for such active exploration in realistic settings. In the present project, the investigation of such strategies shall be pursued from the perspective of „multimodal proprioception:“ correlating joint angles, partial contact information from touch sensors and joint torques as well as visual information about changes in finger and object position in such a way as to make predictions about "useful aspects" for shaping the ongoing interaction. The tactile-sensitive poking stick has mounted our
The tactile-sensitive poking stick has mounted our