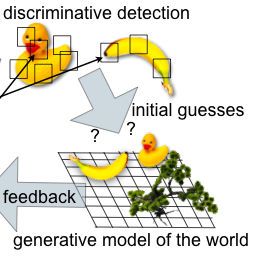
 The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
read more »






















 The research line Attentive Interfaces focuses on the development of alternative human-machine interfaces (HMI). We consider attention to be the key point of our research. Attention in the concept of Attentive Interfaces is a coin with two sides: We exploit correlates of human attention as input to HMI, while at the same time, we want the machine to adapt to the human user as neccessary, that is, to be "attentive".
The research line Attentive Interfaces focuses on the development of alternative human-machine interfaces (HMI). We consider attention to be the key point of our research. Attention in the concept of Attentive Interfaces is a coin with two sides: We exploit correlates of human attention as input to HMI, while at the same time, we want the machine to adapt to the human user as neccessary, that is, to be "attentive". Active Vision considers vision as a process of active data aquisition, i.e. actively pointing the cameras towards interesting regions within the scene, eventually changing zoom as well.
Active Vision considers vision as a process of active data aquisition, i.e. actively pointing the cameras towards interesting regions within the scene, eventually changing zoom as well.  In order to handle the ever growing amount of digital images, in this project we develop a content-based image retrieval system offering the possibility to efficiently search large image databases by automatically finding similar images. To this end, we use automatically extracted image features, derived from a selection of image candidates.
In order to handle the ever growing amount of digital images, in this project we develop a content-based image retrieval system offering the possibility to efficiently search large image databases by automatically finding similar images. To this end, we use automatically extracted image features, derived from a selection of image candidates. 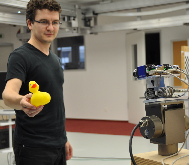 An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object.
An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object. In the near future, more and more people will need assistance in everyday tasks while they still want to maintain a high degree of self-reliance. Cognitive robot servants will fulfill their individual needs. One promising way develop robots with a sufficiently high adaptability is to equip cognitive robots with task learning abilities, that lets them learn a task from demonstrations of naive (non-expert) users. This paradigm is widely known as Programming by Demonstration (PbD) or Imitation Learning.
In the near future, more and more people will need assistance in everyday tasks while they still want to maintain a high degree of self-reliance. Cognitive robot servants will fulfill their individual needs. One promising way develop robots with a sufficiently high adaptability is to equip cognitive robots with task learning abilities, that lets them learn a task from demonstrations of naive (non-expert) users. This paradigm is widely known as Programming by Demonstration (PbD) or Imitation Learning.