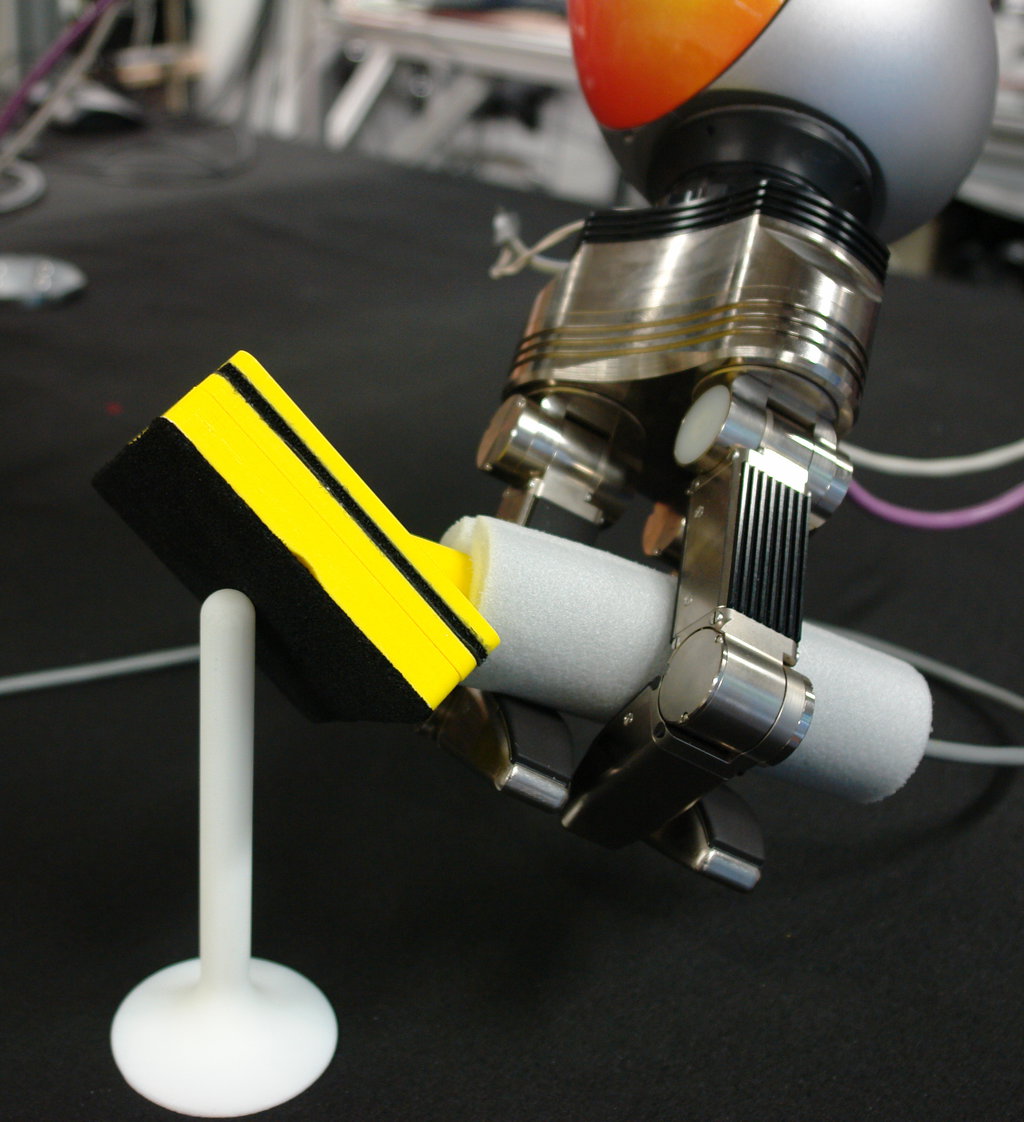
 In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
In the project REBA+, funded within DFG priority program "Autonomous Learning", we develop, implement and evaluate rich extensions of a robot's body schema, along with learning algorithms that use these representations as strong priors in order to enable rapid and autonomous usage of tools and a flexible coping with novel mechanical linkages between the body, the grasped tool and target objects.
read more »






















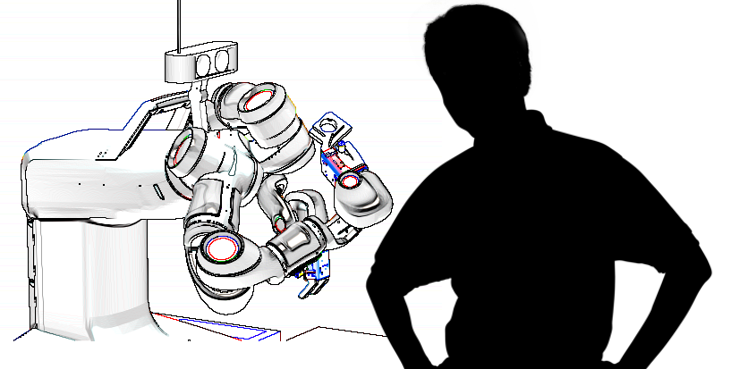 The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task.
The SARAFun project has been formed to enable a non-expert user to integrate a new bi-manual assembly task on a robot in less than a day. This will be accomplished by augmenting the robot with cutting edge sensory and cognitive abilities as well as reasoning abilities required to plan and execute an assembly task.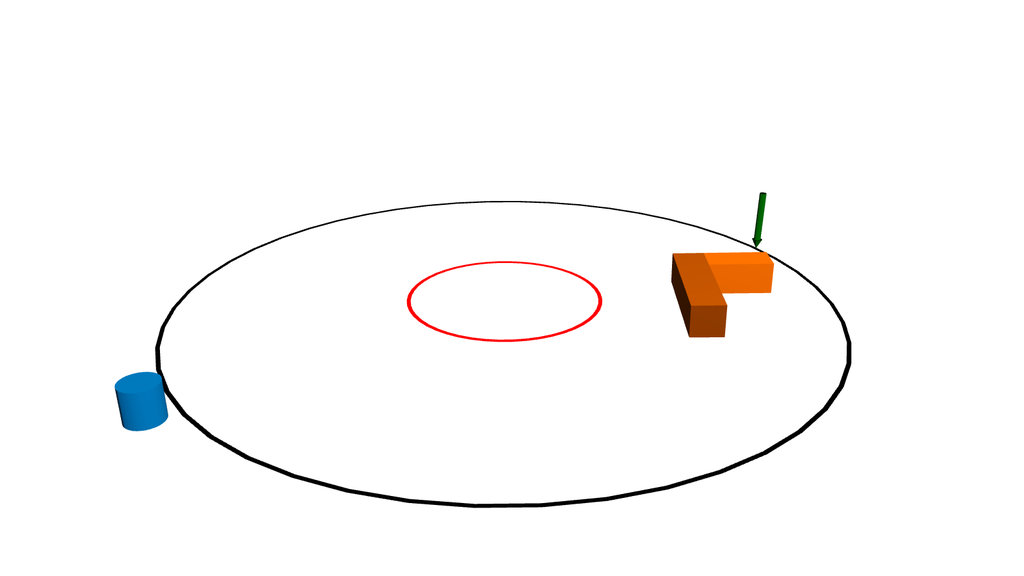
 Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands.
Clothing provides a challenging test domain for research in the field of cognitive robotics. On the one hand, robots have to make use of commonsense knowledge to be able to understand the socially constructed meaning and function of garments. On the other hand, the variance resulting from deformations and differences between individual items of clothing calls for implicit representations which have to be learned from experience. Our robot uses topological, geometric, and subsymbolic knowledge representations for the manipulation of clothes with its anthropomorphic hands. 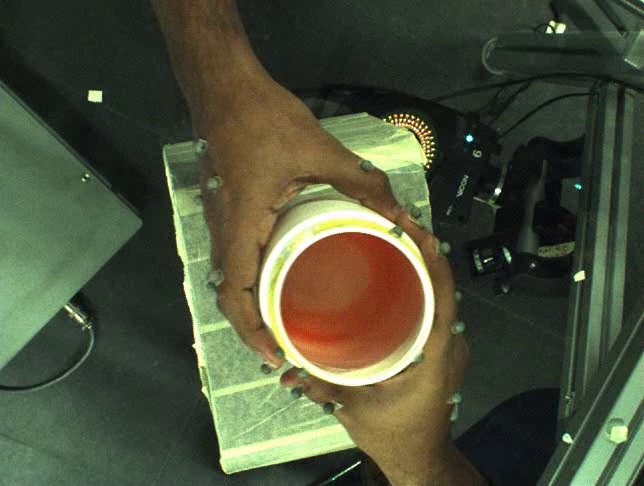 Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.
Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.