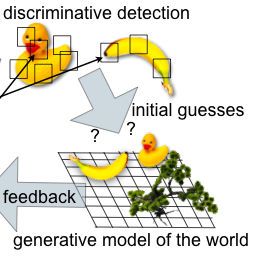
 The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
The ultimate goal of biological vision systems is to infer knowledge about the outside world that is relevant for the system in order to interact with its environment. Therefore, it is not sufficient to just determine the category or the mere object identity. Many variables of interest must be estimated, for example the distance towards an object, the size, orientation, velocity or even such abstract variables like the mood of another animal. In this project we aim to extend existing invariant recognition approaches by using a new approach to hierarchical generative networks in order to implicitly represent (and learn) visual objects, and finally even scenes.
read more »






















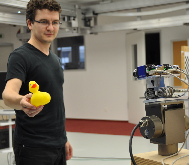 An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object.
An important capability for robotic vision systems is to distinguish objects from their background. In this project we study figure-ground segmentation for online object learning in an unconstrained interaction scenario: An object of interests is presented to the robot by hand in a dynamically changing, cluttered background. Employing attention mechanism and color-based clustering, we can successfully segment the object.