 Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.
Which relations exist between properties of animals or people and their kinematic patterns? For example, can we tell, who performed a hand-over of which kind of object under which conditions just by looking at the sequence of joint angles? We try to find answers to these questions by employing a 3D motion tracking system.
read more »






















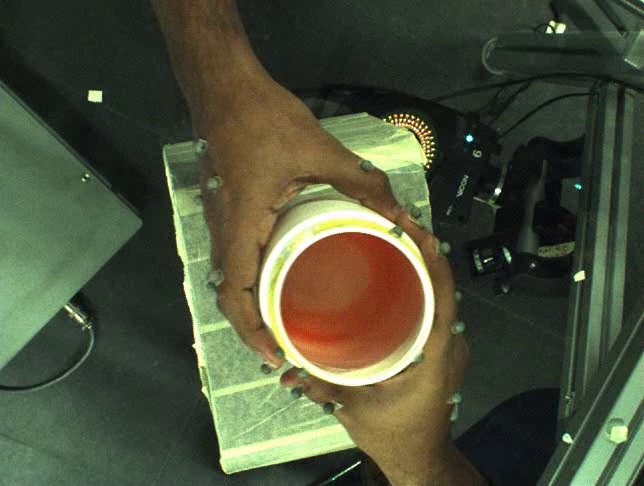
 While language provides us with a concise code capturing much of the movement complexity of our mouth, we still lack a comparable representation for the movement of our hands. This project aims to create a database of human hand interaction patterns from a variety of multimodal data sources. An associated goal is to develop methods for the clustering of captured trajectory data into physics-based models of manual interaction. We hope that the resulting database can make a contribution towards a better grounding of control strategies for anthropomorphic robot hands and develop for robotics a similar utility as the WordNet database has for linguistics.
While language provides us with a concise code capturing much of the movement complexity of our mouth, we still lack a comparable representation for the movement of our hands. This project aims to create a database of human hand interaction patterns from a variety of multimodal data sources. An associated goal is to develop methods for the clustering of captured trajectory data into physics-based models of manual interaction. We hope that the resulting database can make a contribution towards a better grounding of control strategies for anthropomorphic robot hands and develop for robotics a similar utility as the WordNet database has for linguistics.