Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Autonomous Haptic Exploration
Optimization for a floating Myrmex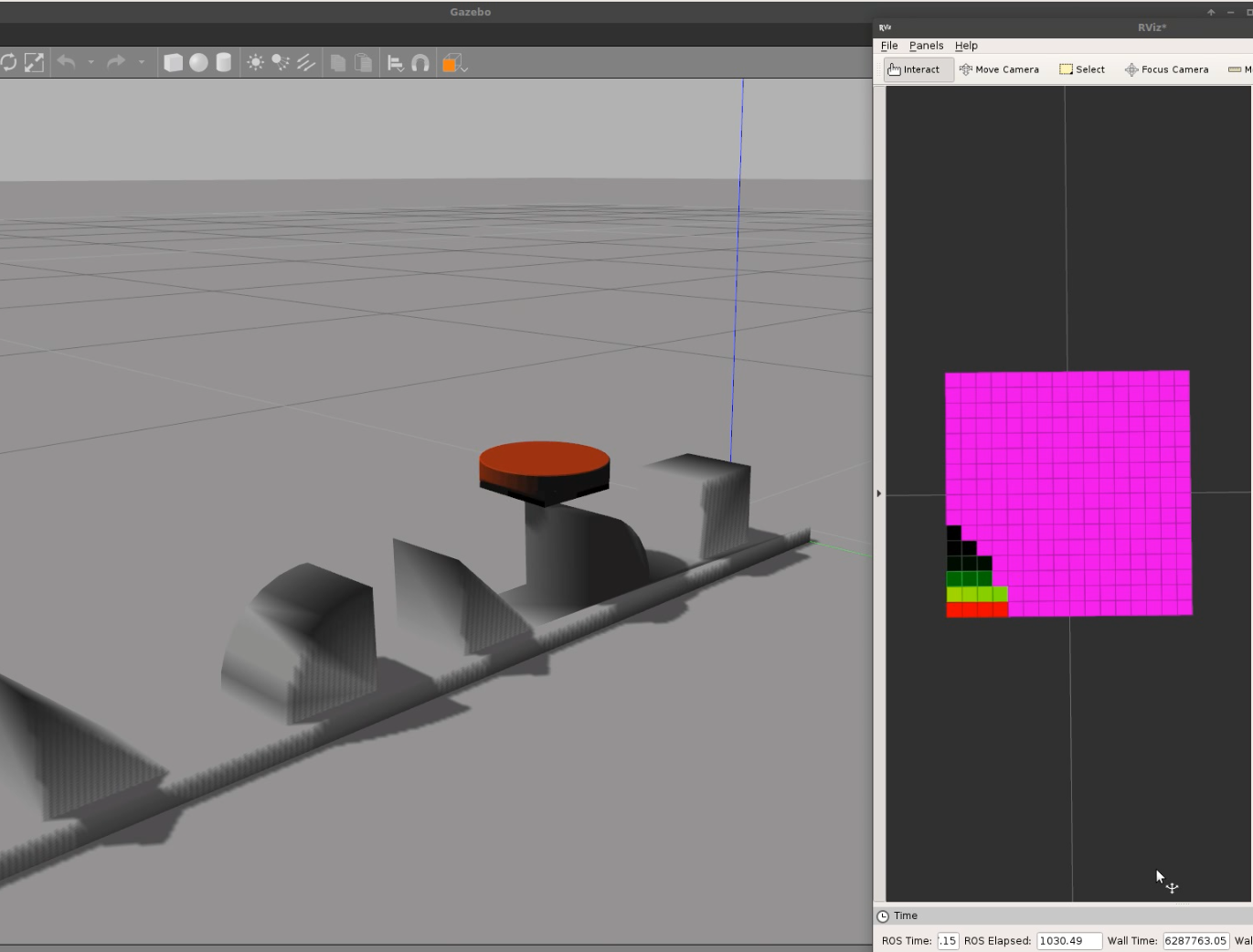
PlosOne Publication to the project: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0226880
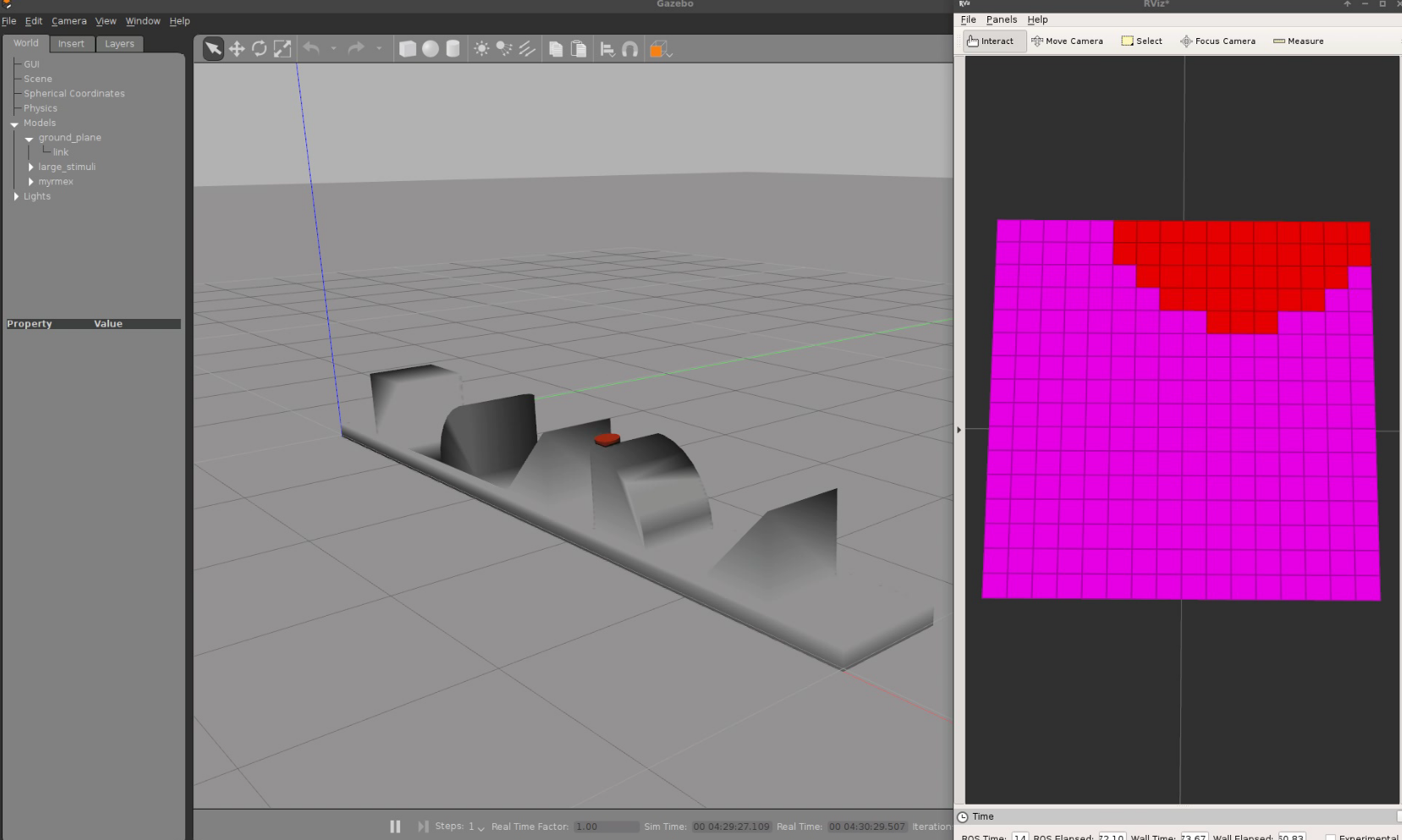
With the help of a physics-driven simulation environment and reinforcement learning, our goal is to learn autonomous haptic exploration behavior in a three-dimensional environment. Visualization of our haptic simulation environment and of our simulated tactile sensor Myrmex (red blob in the figure) can be found under the following link:
http://www.techfak.uni-bielefeld.de/persons/abarch/myrmex.ogv
Robot performs haptic exploration with Myrmex
The ultimate goal is to enable a robot to perform a goal-oriented haptic task in an unknown 3D environment.
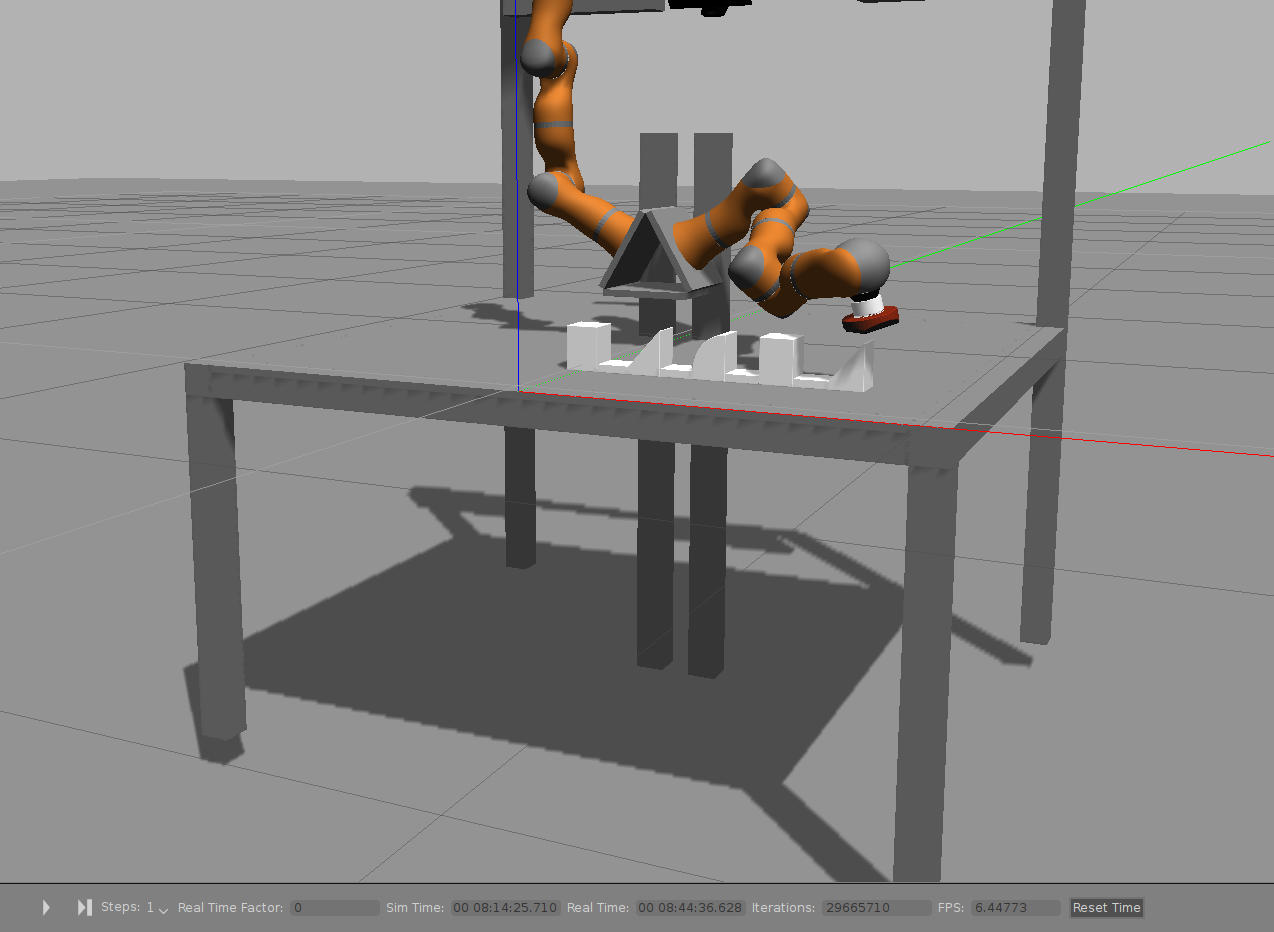
An illustration of myrmex control performed by a kuka arm for randomly generated pose can be found under the following link (video speed=real x 3):
http://www.techfak.uni-bielefeld.de/persons/abarch/videos/robot.mp4


