Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
Manipulating Paper
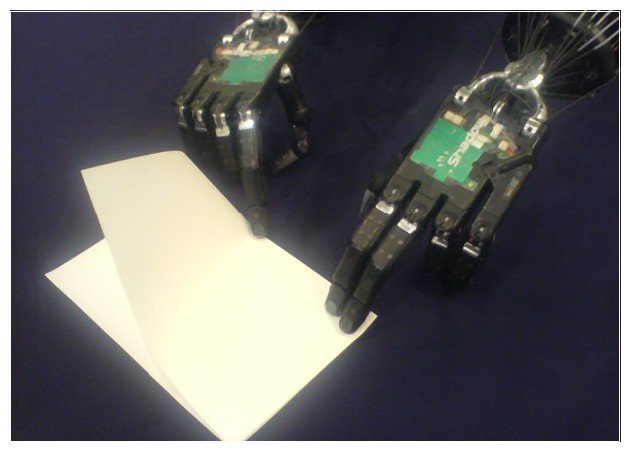 In trying to enable robots to interact with the real world, we have to consider the fact that most everyday items are designed to be used by human hands. This project constrains the "interaction world" to an apparently small domain of interaction with sheets of paper (and paper-like objects). Despite this simplification, the skills of current anthropomorphic robots do not even come close to rivaling those of humans in this area.
In trying to enable robots to interact with the real world, we have to consider the fact that most everyday items are designed to be used by human hands. This project constrains the "interaction world" to an apparently small domain of interaction with sheets of paper (and paper-like objects). Despite this simplification, the skills of current anthropomorphic robots do not even come close to rivaling those of humans in this area.
Industrial robots are able to assemble cardboard boxes, and even more complex objects made from paper or cardboard, in seconds. However, industrial robots are extremely specialized for specific jobs. By contrast, anthropomorphic robots possess generic end effectors that can be used for widely differing tasks. The drawback of this generality is significantly increased complexity in the area of controlling and planning. In the future, it is envisioned that robots will be utilized as assistants in the home. Some of the everyday tasks that we could expect of them are general cleaning chores or the folding of clothes. The task of folding clothes shares many similarities with the task of folding paper. Therefore, the algorithms created in this project could be adapted to work in other manipulation domains.
Strategy
The problem of enabling an anthropomorphic robot to interact with paper (or paper-like objects) can be split into the following sub problems:
- Modeling interaction with deformable/compliant objects
- Action based representation of interaction
- Segmentation of interaction into coarse and fine interaction "skeletons" to allow hierarchical (de-)composition of interaction sequences
- Creation of a real-time computer-vision-based observation system, which will be closely interwoven with robot controllers and planning modules (Visual Servo Control)
- Robust vision-based detection, tracking and pose estimation of a (deformed) sheet of paper and end effectors (e.g., Shadow-Hand)
- Development and implementation of primitive controllers to:
- move the paper over the worktop
- hold the paper at a certain position
- grasp a corner or an edge of the paper
- move a grasped part of the paper to another position
- create a fold along a certain line on the sheet of paper
 |
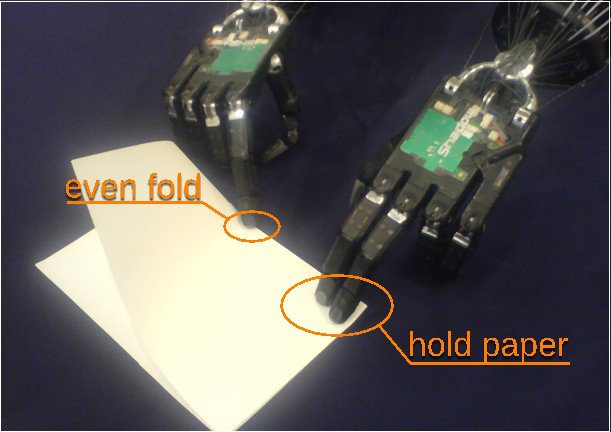
development of basic controllers such as holding or evening a fold |
| vision-based estimation of interaction locations |
|
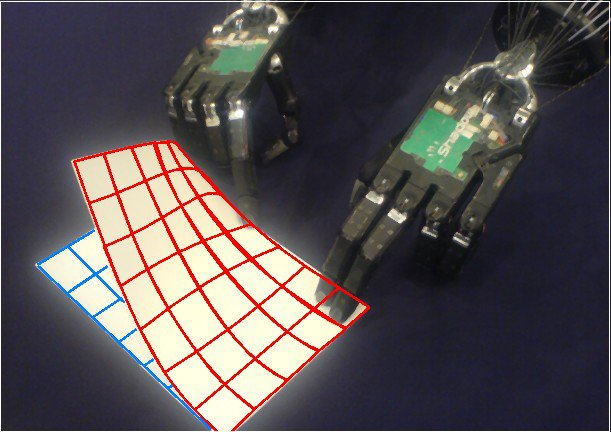 |
representation and moddeling of paper manifold e.g. using PSOM |
First steps
The creation of a system, which is able to point to each corner of a sheet of paper that has been arbitrarily placed on the worktop. This entails:
- familiarisation with the field of robotics
- implementation of single-camera visual servo control system
A possible extension is to enable pointing to any location on the sheet of paper.


