Neuroinformatics Group






















Universität Bielefeld › Technische Fakultät › NI
Search
HUMANOIDS 2016 Workshop "Tactile sensing for manipulation: new progress and challenges"

A full-day Workshop on
Tactile sensing for manipulation:
new progress and challenges
Motivation and topics:
Tactile sensing technology has achieved lots of progress in recent decades. Currently advanced tactile sensors have been deployed to cover the body of robots to provide them with body self-awareness, the robot hand in order to improve the hand’s dexterous manipulation capability, and on wearable devices to facilitate the human robot interaction etc. However, robot manipulation skills are still far behind their counterpart—human. We are considering that the reasons can come from three aspects.
- Available tactile sensors are still far from matching the capabilities of the sense of touch in humans;
- Tactile data processing algorithms and data-driven learning technology are still immature;
- General and robust robot manipulation control framework are missing.
Within this workshop we will bring together experts from the different domains, e.g. tactile hardware development, robot manipulation and machine learning to discuss progress and challenges of tactile-driven manipulation, foster potential collaborations, and reinforce the strict link among such interdisciplinary research fields to facilitate progress in this community. Central to the discussion will be three key questions:
- What are the missing features in the available tactile sensor, how to push the tactile sensor technology’s state of the art?
- How to combine data-driven machine learning technology and available tactile sensor so that robots can “actively” learn environment knowledge and make the decision depending on the partially acquired environment information (object geometry, texture, softness, Dof and affordance etc.).
- How can robot exploit the available tactile perception technology to safely interact with the environment?
The workshop topics include but are not limited in the following:
- Advanced anthropomophic tactile sensor development and calibration
- Deep learning and its application to tactile sensing and control
- Tactile-driven exploration strategies
- Tactile-driven robot body/tool self-calibration(robot body schema)
- Tactile servoing and manipulation
- Tactile image and tactile object perception
- Tactile-based unknown object grasp and in-hand manipulations
- Using tactile for unknown object reconstruction, classification and slip detection
- Whole-body sensing based manipulation and safety
Invited speakers:
Prof. Gerald Loeb (University of Southern California, U.S.A)
Prof. Veronica Santos (UCLA, U.S.A)

Dr. Lorenzo Natale (iCub Facility, IIT, Italy)

Prof. Jan Peters (TU Darmstadt, Germany)

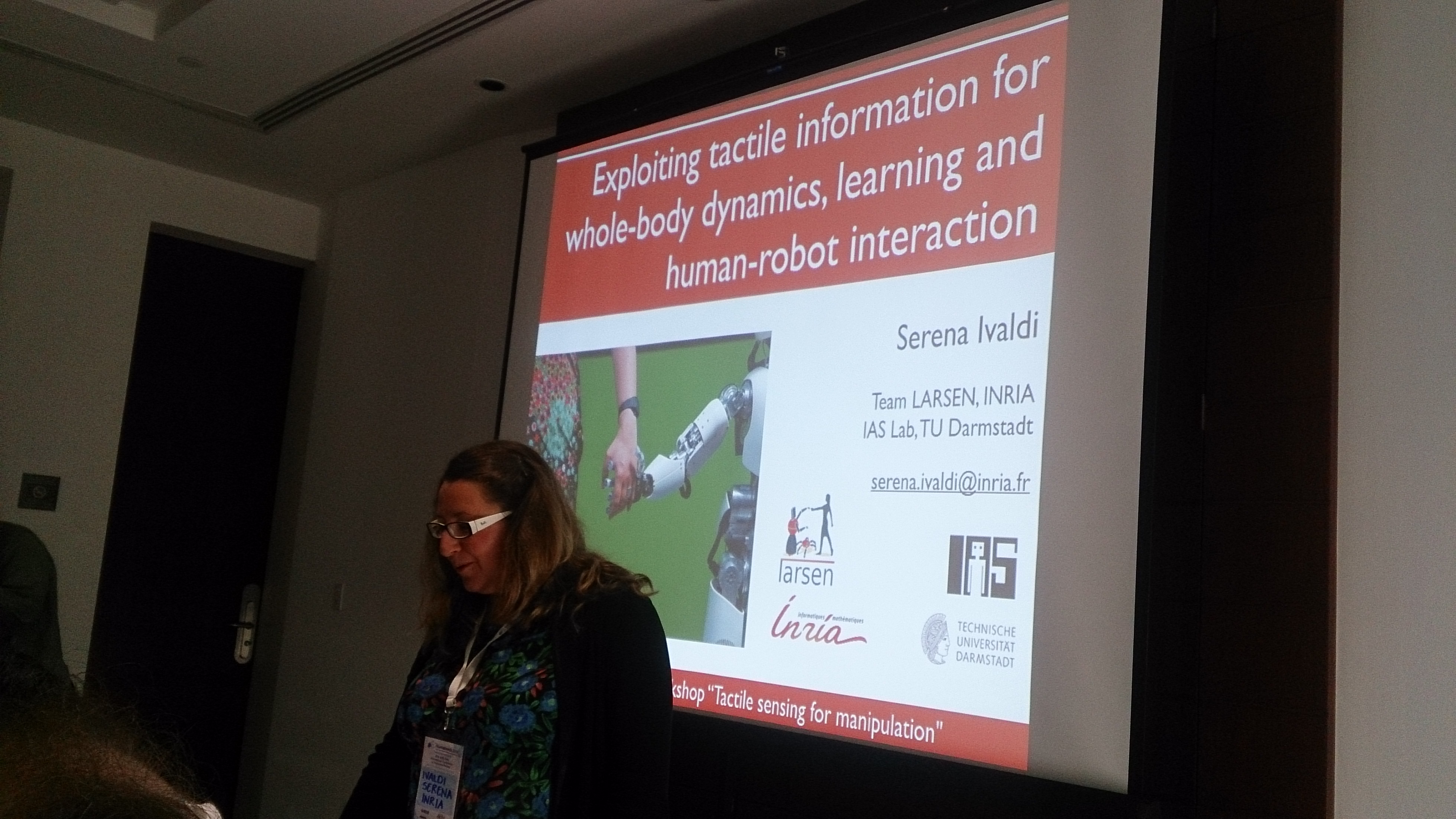
Dr. Serena Ivaldi (INRIA Nancy Grand-Est ,France)
Dr. Robert Haschke (AGNI, Bielefeld University, Germany)

Prof. Tamim Asfour (KIT, Germany)

Prof. Patrick Van Der Smagt (TUM, Germany)
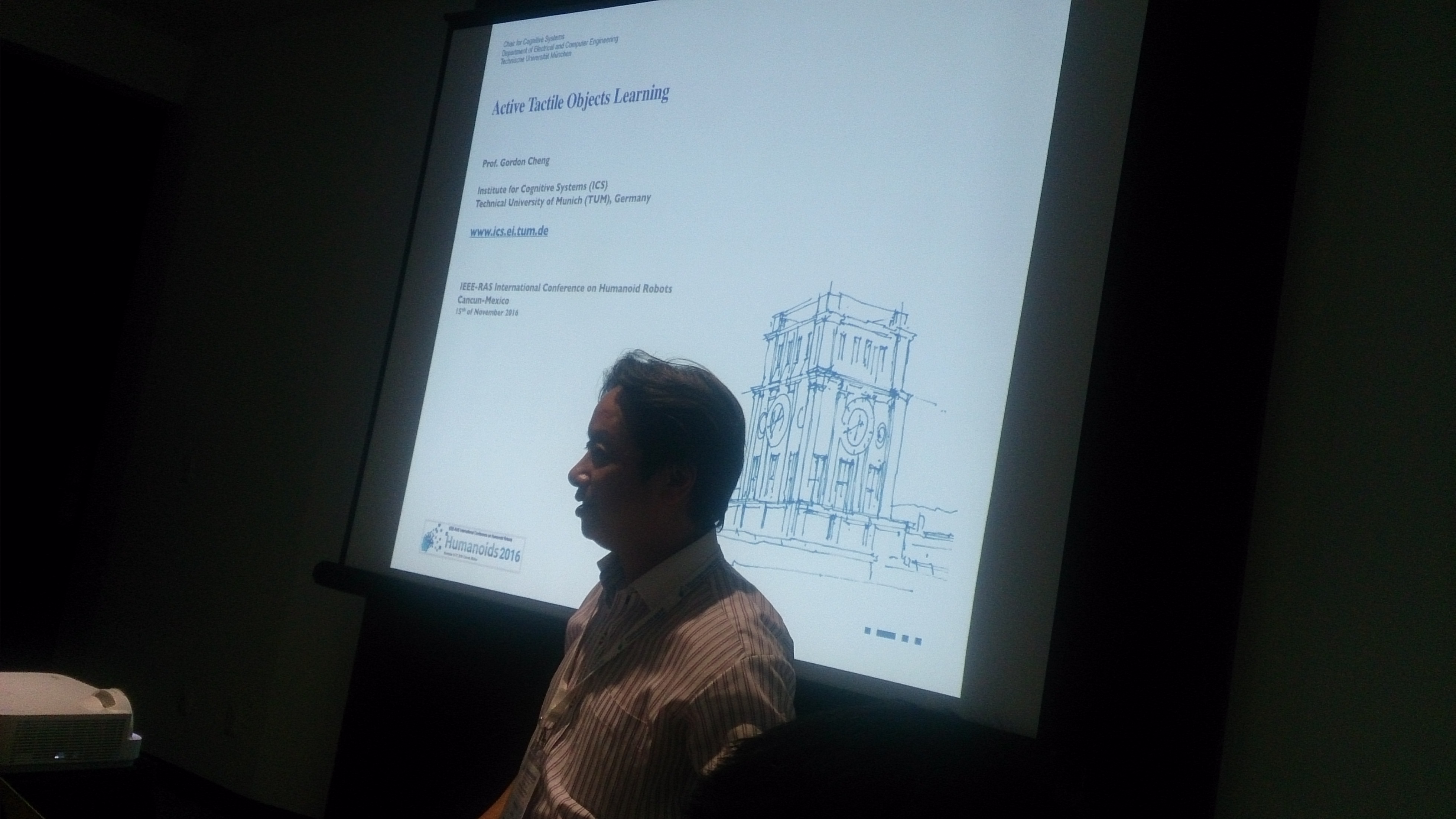
Prof. Gordon Cheng (TUM, Germany)
Prof. Charles C. Kemp (Georgia Tech, U.S.A)
Call for papers:
Prospective participants are required to submit an extended abstract (maximum 2 pages in length) before 10, October, 2016, videos are also welcome!
All submissions will be reviewed using a single-blind review process. Accepted contributions will be presented during the workshop as posters. Submissions must be sent in pdf, following the IEEE conference style (two-columns), to:
qli_AT_techfak_DOT_uni-bielefeld_DOT_de
indicating [Humanoids 2016 Workshop] in the e-mail subject. The selected extened versions of the best papers can be included in a special issue in IJHR (International Journal of Humanoid Robotics ).
Important Date
Paper Submission Deadline: October 10
Notification of acceptance: October 16
Camera-ready deadline: October 20
Workshp day: November 15
Organizers
Qiang Li, Andrea Cherubini, Lorenzo Natale, Van A. Ho, Zhe Su, Filipe Veiga
Supported by IEEE TCs:
On Robotic Hands, Grasping and Manipulation
On Haptics
On Robot Learning
On Mobile Manipulation
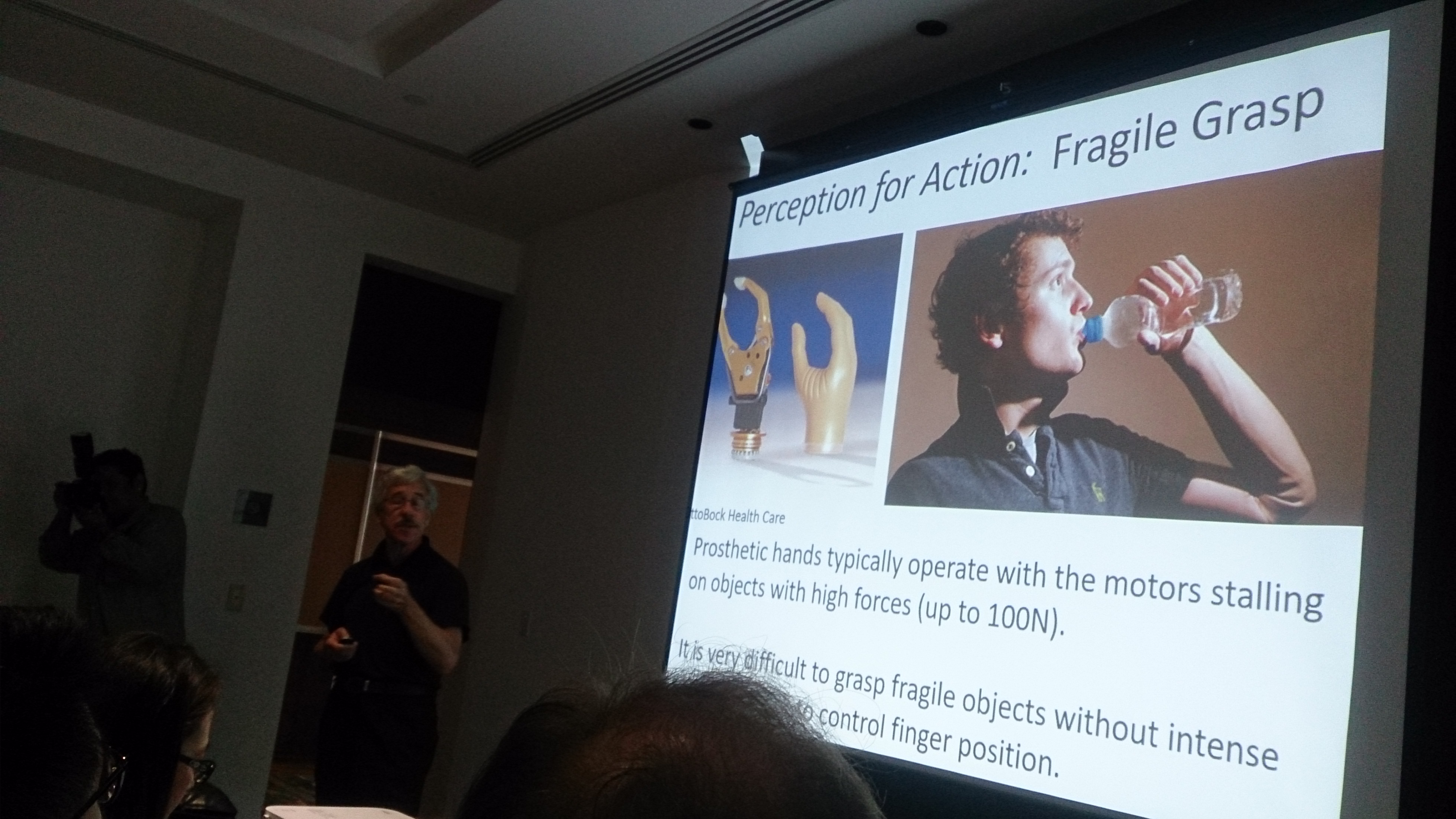
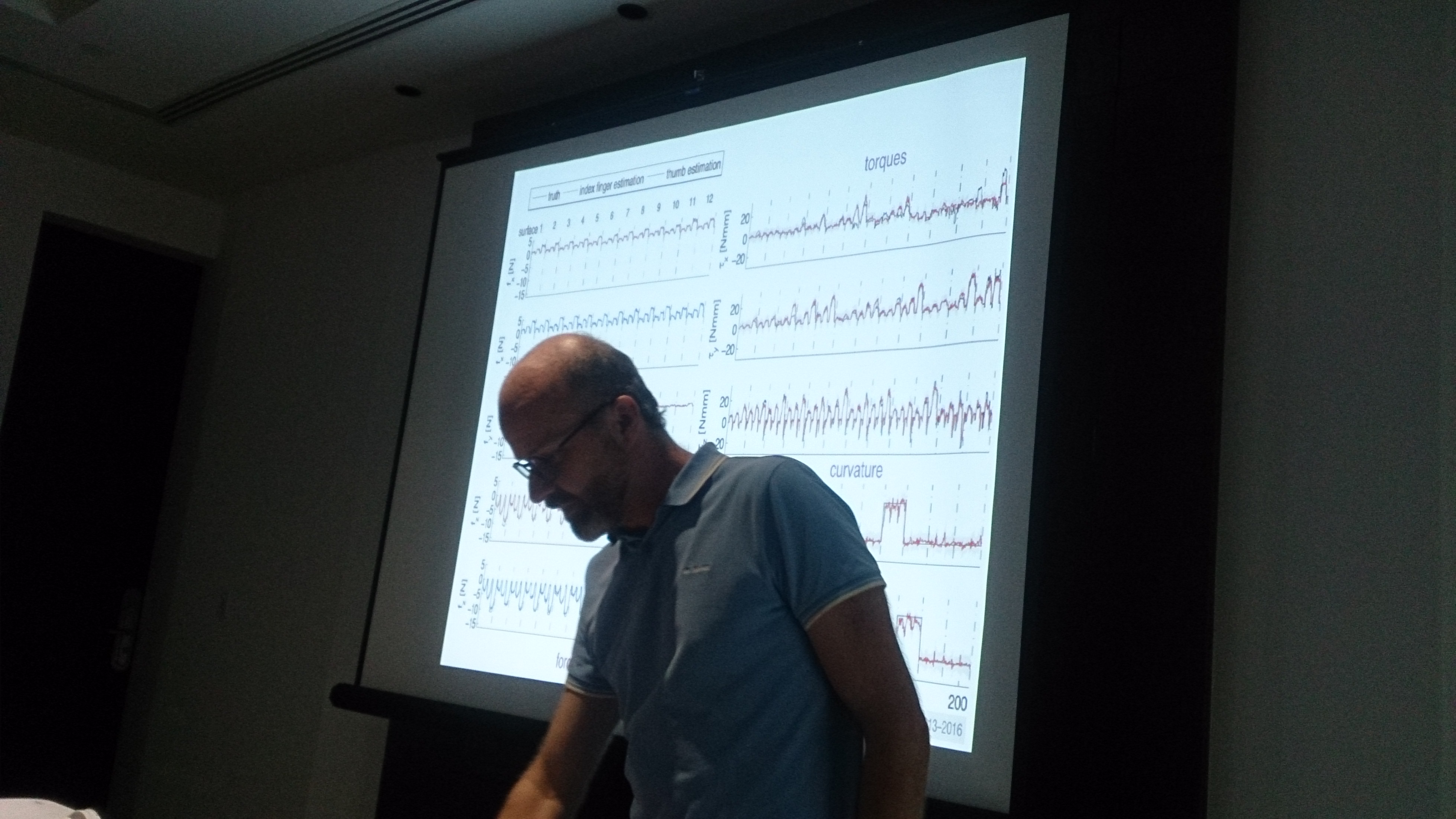
Photos



